
Sfruttare grafene e nanomateriali per l’acqua del futuro
Nuove frontiere nella raccolta sostenibile di risorse idriche. La crisi idrica globale è ormai una realtà strutturale che sta ridefinendo

Nuove frontiere nella raccolta sostenibile di risorse idriche. La crisi idrica globale è ormai una realtà strutturale che sta ridefinendo
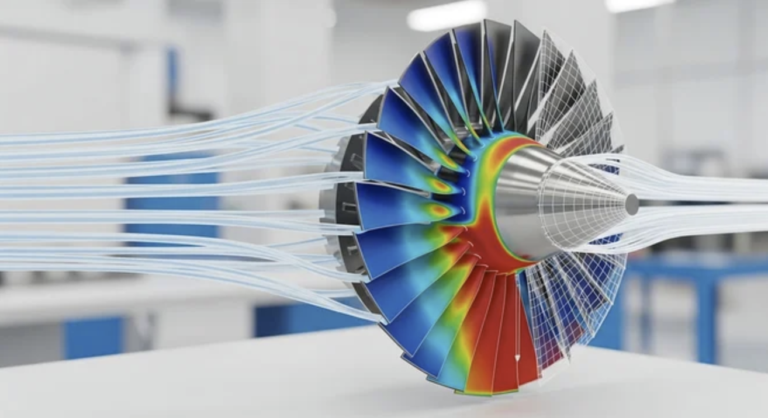
Negli ultimi anni i software CFD sono diventati sempre più facili da usare. Questo non garantisce tuttavia l’affidabilità dei risultati.

Anche quest’anno l’Avv. Agostino Crosti, Professore a contratto in Diritto Penale ed Etica dell’Ingegnere Industriale presso il Dipartimento di Chimica, Materiali
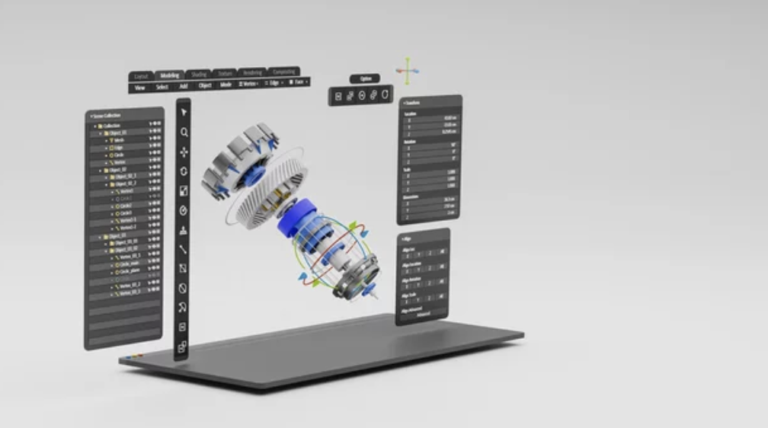
Per decenni, la progettazione assistita da computer (CAD) è stata la pietra angolare dell’ingegneria moderna. Eppure, gran parte del flusso
La matematica è stata in grado di definire superfici che dividono lo spazio in due labirinti perfettamente separati, senza mai

L’AI sta costringendo le aziende a riprogettare le loro organizzazioni tecnologiche dall’interno verso l’esterno: man mano che gli agenti AI
Nel mondo reale, le valvole non leggono i disegni.Una valvola progettata per aprire a 178 bar… aprirà davvero a 178
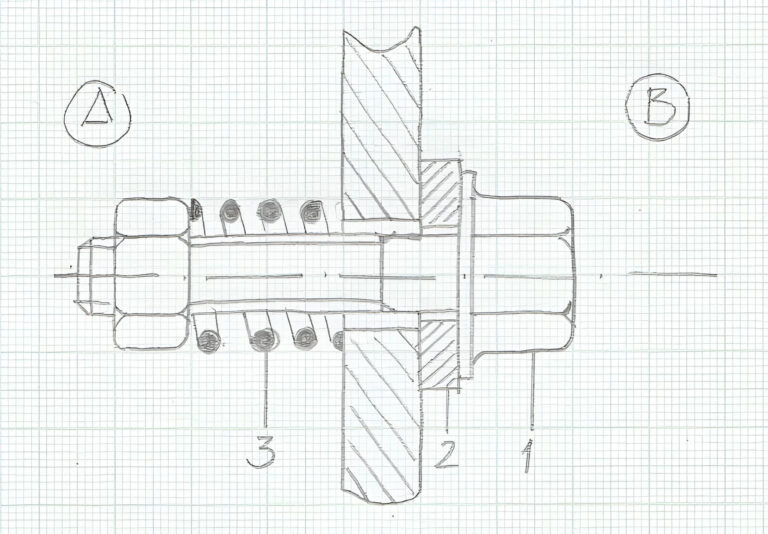
Collegare due alberi rotanti è più complesso di quanto sembri, perché disallineamenti inevitabili dovuti a dilatazioni, usura e assestamenti generano

Il “field-programmable robotic folding sheet” sviluppato dal KAIST introduce un nuovo approccio alla progettazione meccanica e ai sistemi di controllo,
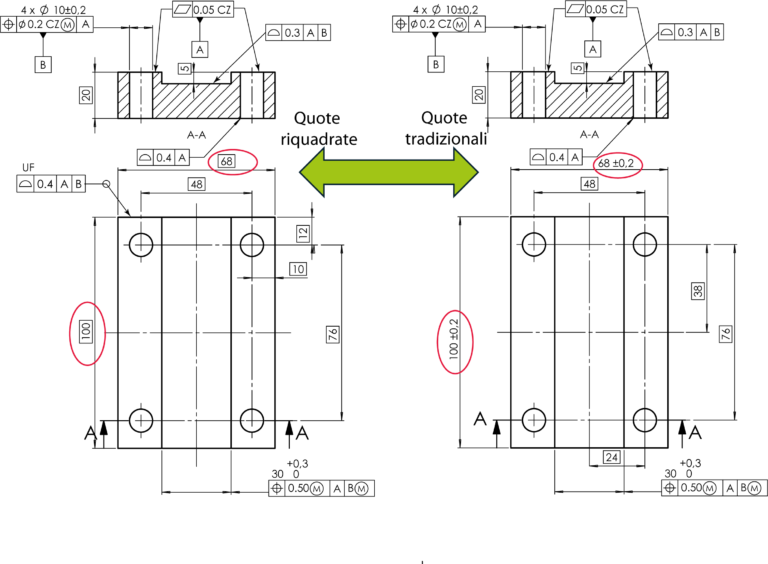
Parte seconda: dalla teoria alla pratica. Come chiarito nella rubrica precedente, una quota riquadrata TED (Theoretically Exact Dimensions) è priva

Parker Hannifin annuncia l’espansione del suo portafoglio SensoControl che si arricchisce di una nuova generazione di controller e interruttori, rafforzando

La nuova serie 3M™ VHB™ Tape Max raggiunge resistenze al taglio fino a 3,24 MPa — il doppio dei nastri


