Dalla crescita fisica all’autosufficienza strutturale: come i robot che consumano altri robot stanno ridefinendo l’autonomia meccanica.
Nel panorama attuale della robotica, persiste una forte asimmetria tra “mente” e “corpo”. Da un lato, l’intelligenza artificiale ha raggiunto traguardi straordinari: grazie all’apprendimento automatico, i sistemi cognitivi dei robot sono in grado di evolversi e migliorare rapidamente. Dall’altro, il corpo fisico delle macchine rimane un sistema chiuso, statico, incapace di crescere, autoripararsi o adattarsi in autonomia all’ambiente circostante.
Per colmare questo divario, un gruppo di ricercatori della Columbia University ha introdotto un concetto rivoluzionario: il metabolismo robotico. Questo nuovo paradigma consente ai robot di assorbire e integrare materiali provenienti dall’ambiente o da altri robot, trasformandoli in risorse per crescere fisicamente e potenziare le proprie capacità operative.
L’idea trae ispirazione diretta dalla biologia: negli organismi viventi, elementi riciclabili come gli amminoacidi vengono impiegati per costruire, riparare e adattare i tessuti. Applicando lo stesso principio alla robotica, diventa possibile immaginare macchine in grado di evolvere strutturalmente in maniera autonoma.
Come sottolinea Hod Lipson, direttore del Creative Machines Lab della Columbia University: “Abbiamo robot che pensano, ma non abbiamo robot che crescono. La crescita è una delle caratteristiche fondamentali della vita, e finora è mancata nella robotica.”
L’obiettivo, quindi, non è soltanto permettere un’espansione volumetrica, ma inaugurare una vera e propria evoluzione funzionale, in cui la morfologia robotica diventa dinamica, reattiva e capace di adattarsi a compiti e contesti sempre diversi.
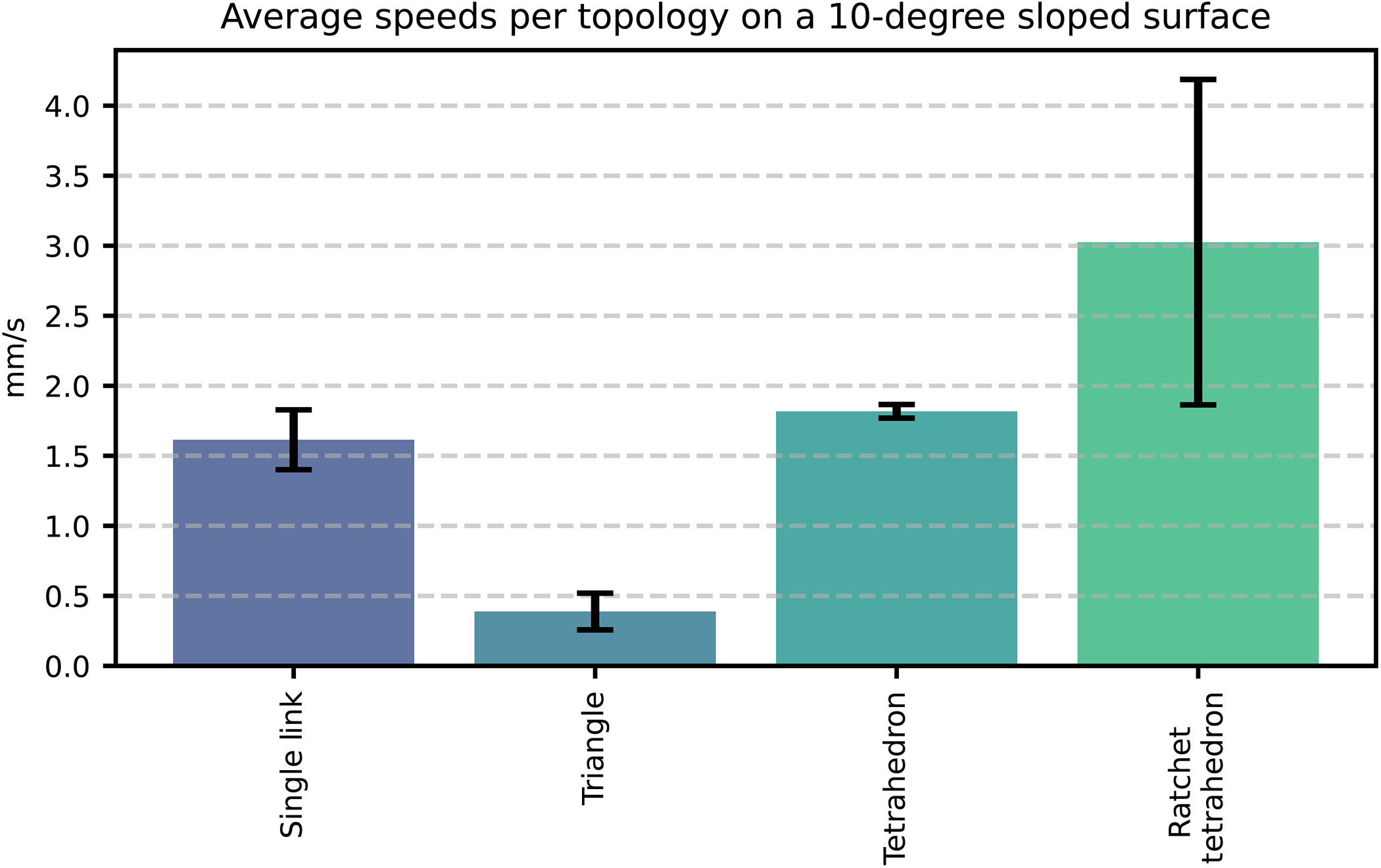
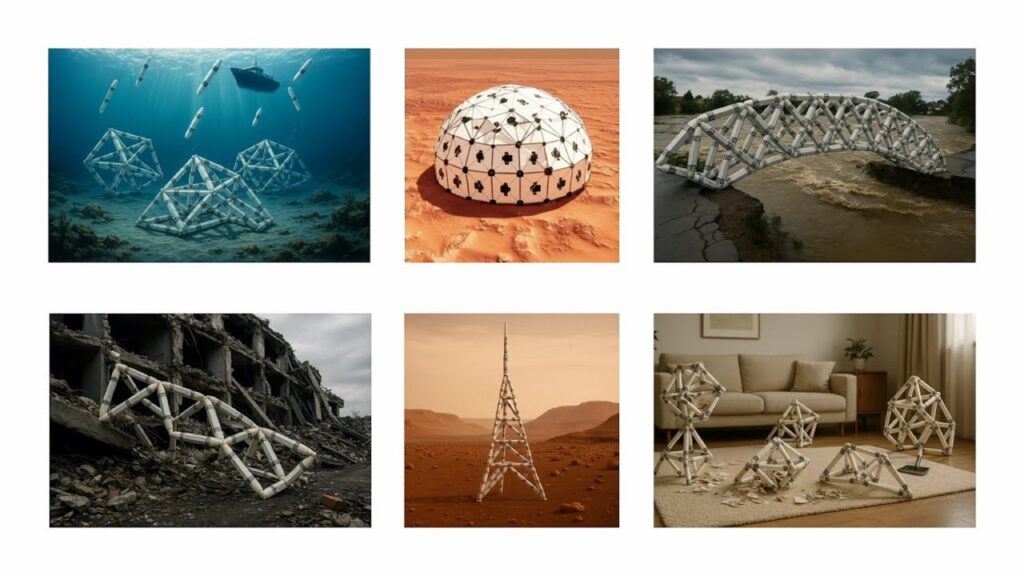
Il fulcro sperimentale di questa ricerca è il Truss Link, un modulo robotico ispirato al giocattolo Geomag. Si tratta di un elemento dotato di connettori magnetici, capace di autoassemblarsi in strutture bidimensionali e tridimensionali. Questi moduli possono essere “consumati” da altri robot per espandere la propria struttura, migliorando le prestazioni. Come riportato nello studio pubblicato su Science Advances, un robot tetraedrico ha migliorato la propria capacità di locomozione dopo l’integrazione di un modulo aggiuntivo.
Lipson sottolinea: “Abbiamo dimostrato che un robot può trovare un altro robot, decidere se quel robot è utile, e poi incorporarlo nel proprio corpo per migliorare le proprie capacità.” Questo processo non è casuale, ma guidato da un algoritmo che valuta l’utilità funzionale dei moduli disponibili. Il robot non solo riconosce i componenti compatibili, ma li seleziona e li integra in modo strategico, dimostrando una forma embrionale di intelligenza morfologica.
Questo tipo di comportamento apre la strada a una robotica evolutiva, dove le macchine non sono più entità statiche, ma organismi meccanici capaci di adattamento strutturale.

Progetto e prototipi
Nel cuore del progetto condotto dal team della Columbia University si trova una piattaforma robotica modulare, composta da unità chiamate Truss Links. Questi moduli, ciascuno lungo circa dieci centimetri, presentano una geometria tetraedrica e sono dotati di attuatori elettromagnetici, sensori inerziali e microcontrollori ARM Cortex-M4. I giunti magnetici orientabili a novanta gradi permettono l’autoassemblaggio tra moduli, rendendo possibile la riconfigurazione strutturale in tempo reale senza intervento umano.
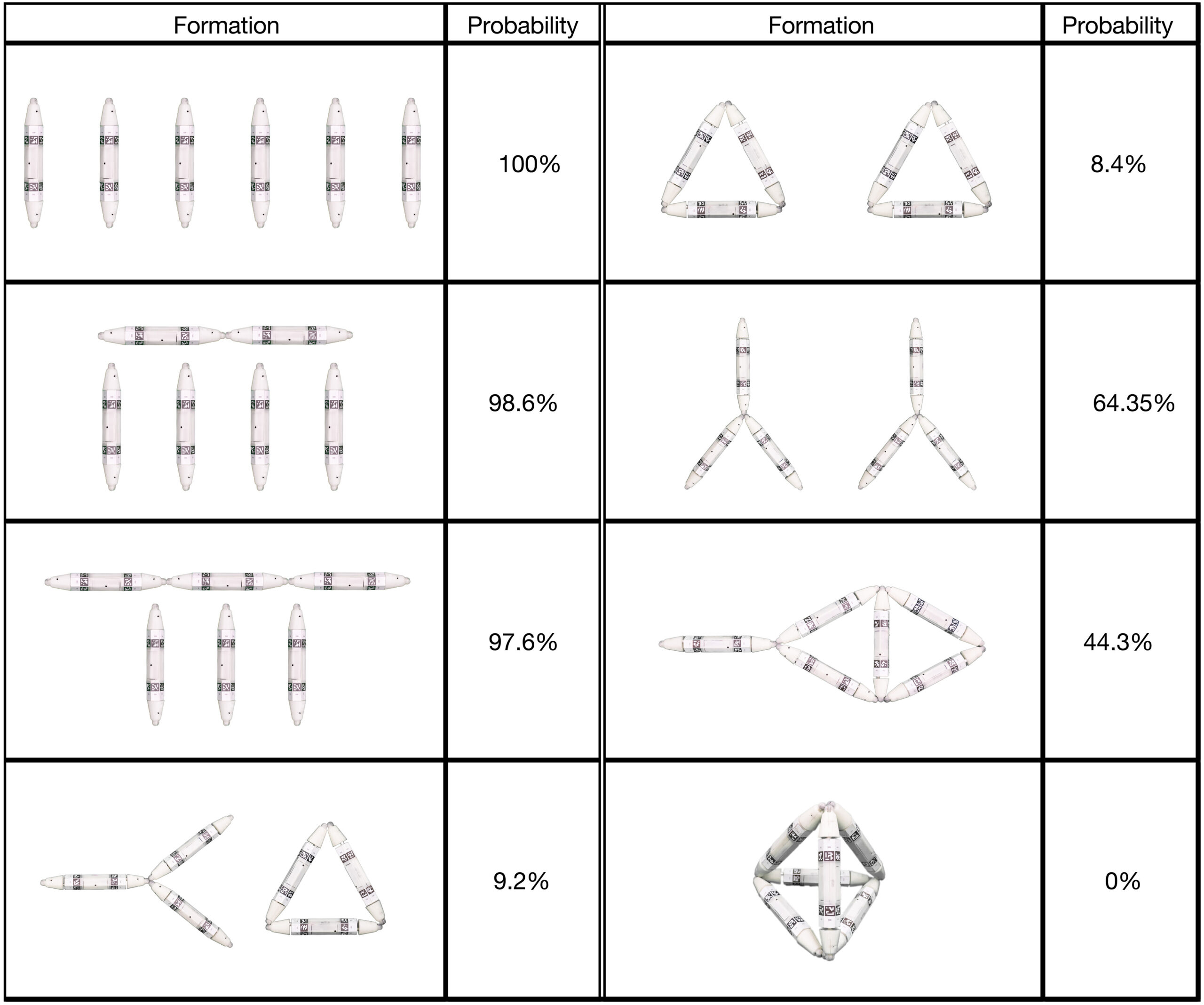
L’ambiente di test è stato progettato per simulare condizioni di mobilità variabile, con ostacoli fisici e gradienti di terreno. I robot, inizialmente configurati in forme diverse come strutture lineari, a L o a T, erano equipaggiati con ruote omnidirezionali o cingoli, a seconda della locomozione da ottimizzare. Alcuni moduli erano attivi, cioè dotati di motori e sensori, mentre altri erano passivi e servivano esclusivamente come elementi strutturali. Il compito del robot era quello di valutare quali moduli incorporare per migliorare le proprie prestazioni in base alle condizioni ambientali.
La comunicazione tra i robot avveniva attraverso un protocollo di comunicazione wireless per lo scambio di informazioni tra moduli. Ogni interazione tra robot seguiva una sequenza di handshake in tre fasi: identificazione, negoziazione e integrazione. Durante questa procedura, ciascun robot trasmetteva un pacchetto contenente il proprio identificativo, lo stato funzionale, una mappa morfologica locale e una valutazione interna dell’indice di prestazioni globali (fitness). Quest’ultima veniva calcolata in base a parametri come la stabilità, la velocità e l’efficienza energetica.
Una volta ricevuti i dati, il robot eseguiva una simulazione locale tramite un motore fisico semplificato, basato su Bullet Physics, per prevedere l’impatto dell’integrazione del modulo proposto. Se la simulazione indicava un miglioramento in termini di mobilità o stabilità, il robot procedeva all’aggancio fisico del modulo, sincronizzando anche il bus dati di controllo per garantire la coerenza funzionale.
Il processo decisionale era guidato da un algoritmo di apprendimento che valuta configurazioni alternative e ne stima l’efficacia. L’input dell’algoritmo era una rappresentazione voxelizzata della forma attuale del robot e dei moduli disponibili, mentre l’output consisteva in una previsione del miglioramento atteso per ciascuna configurazione possibile. Le metriche utilizzate per valutare l’indice fitness includevano il consumo energetico per metro percorso, la deviazione angolare durante la locomozione, la velocità media su diversi tipi di terreno, la capacità di superamento ostacoli e la resistenza a urti e vibrazioni.
Durante i test, i robot hanno dimostrato la capacità di migliorare la propria locomozione dopo l’integrazione di moduli selezionati. In alcuni casi, hanno persino rimosso moduli precedentemente incorporati quando la configurazione risultava subottimale, manifestando una forma primitiva di metabolismo inverso. Questo comportamento non era programmato manualmente, ma emergeva dall’interazione tra simulazione, apprendimento e valutazione morfologica.

I moduli robotici possono crescere consumando e riutilizzando parti provenienti dall’ambiente circostante e da altri robot. Questa capacità, essenziale per le forme di vita biologiche, è cruciale per lo sviluppo di un’ecologia robotica autosufficiente. Questo articolo illustra in dettaglio la sequenza di sviluppo sopra descritta: dai singoli moduli a un robot tetraedrico a cricchetto completamente assemblato.
Sistemi metabolici distribuiti
Uno degli aspetti più innovativi del progetto riguarda la visione sistemica che i ricercatori propongono: non si tratta semplicemente di robot singoli che si modificano, ma di vere e proprie ecologie robotiche capaci di autosostenersi. Ogni Truss Link non è solo un modulo strutturale, ma anche un potenziale “nutriente” per altri robot. Questa architettura porta la modularità meccanica a un livello superiore: come avviene nei processi biologici già citati, i componenti diventano risorse fungibili che il sistema può riallocare dove sono più necessari. In modo analogo, i robot metabolici sono progettati per riconoscere, assorbire e riutilizzare componenti provenienti da altri robot, purché compatibili con il proprio sistema. La compatibilità non è solo meccanica, ma anche funzionale: ogni modulo deve essere in grado di integrarsi elettricamente e logicamente con l’architettura del robot ospitante. Questo richiede protocolli di comunicazione standardizzati e una gestione dinamica delle risorse, dove ogni robot valuta in tempo reale il valore aggiunto di un potenziale “consumo”.
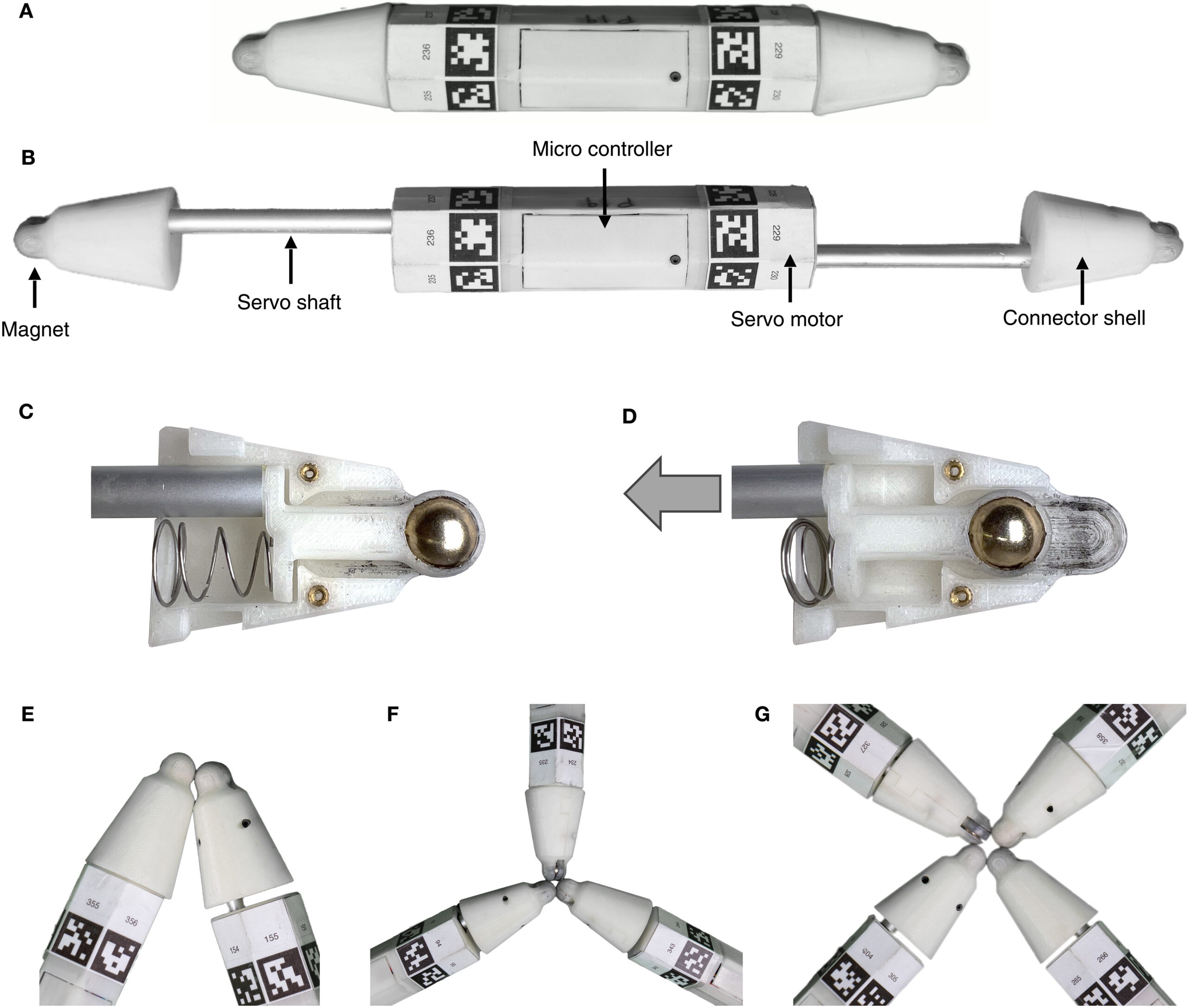
I Truss Links possono espandersi e contrarsi, agganciarsi e sganciarsi, e connettersi simultaneamente a più altri Truss Links. (A) Un Truss Link contratto misura 28 cm di lunghezza e pesa 280 g (B). Quando è completamente esteso, può aumentare la propria lunghezza di oltre il 53%, raggiungendo i 43 cm. Le immagini (C e D) mostrano l’interno del connettore magnetico rispettivamente in stato attivo, con il magnete esposto sulla punta, e in stato completamente contratto, cioè inattivo, con il magnete retratto. La molla conica di compressione all’interno del connettore riporta il magnete allo stato attivo dopo la retrazione, rendendo il Truss Link pronto per una nuova connessione. Il magnete sferico in neodimio è mantenuto in posizione da un supporto magnetico, che ne consente la rotazione libera fino a raggiungere una posizione di equilibrio quando si avvicina a un altro magnete. Questo meccanismo garantisce una connessione solida tra più link da un’ampia e continua gamma di angolazioni. Vengono mostrati collegamenti tra (E) due, (F) tre e (G) quattro connettori.
Riparazione strutturale e adattamento morfologico
Il metabolismo robotico rappresenta una frontiera emergente della robotica avanzata, capace di trasformare radicalmente il modo in cui le macchine interagiscono con l’ambiente e con sé stesse. Oltre alla crescita strutturale, questa tecnologia consente ai robot di avviare processi di autoriparazione. Quando subiscono danni fisici, non sono più vincolati all’intervento umano o alla sostituzione manuale dei componenti: possono cercare moduli compatibili nell’ambiente circostante e integrarli autonomamente per ristabilire la propria funzionalità. Questo comportamento è stato osservato in test sperimentali, nei quali robot danneggiati hanno incorporato gli elementi Truss Links per recuperare la simmetria morfologica e la capacità di locomozione. La riparazione non avviene secondo schemi predefiniti, ma è guidata da algoritmi che valutano la configurazione più efficace in base alle risorse disponibili. In alcuni casi, i robot hanno scelto di adottare forme diverse da quelle originarie, dimostrando che l’adattamento non è soltanto conservativo, ma può assumere una dimensione evolutiva.
Philippe Martin Wyder, primo autore dello studio, sottolinea che la vera autonomia non si esaurisce nel pensiero indipendente, ma include anche la possibilità di sostenersi fisicamente. In questo scenario, il robot smette di essere un pezzo di hardware statico; la capacità di assorbire materiali esterni permette alla macchina di superare il concetto di ‘guasto’, trasformando il danno fisico in un’opportunità di riconfigurazione. In questa prospettiva, il metabolismo robotico diventa un’interfaccia digitale con il mondo fisico, permettendo all’intelligenza artificiale di svilupparsi non solo sul piano cognitivo, ma anche su quello strutturale. Questo concetto apre la strada a una nuova generazione di macchine capaci di modificare la propria forma e funzionalità in risposta alle condizioni esterne, acquisendo resilienza e autosufficienza.
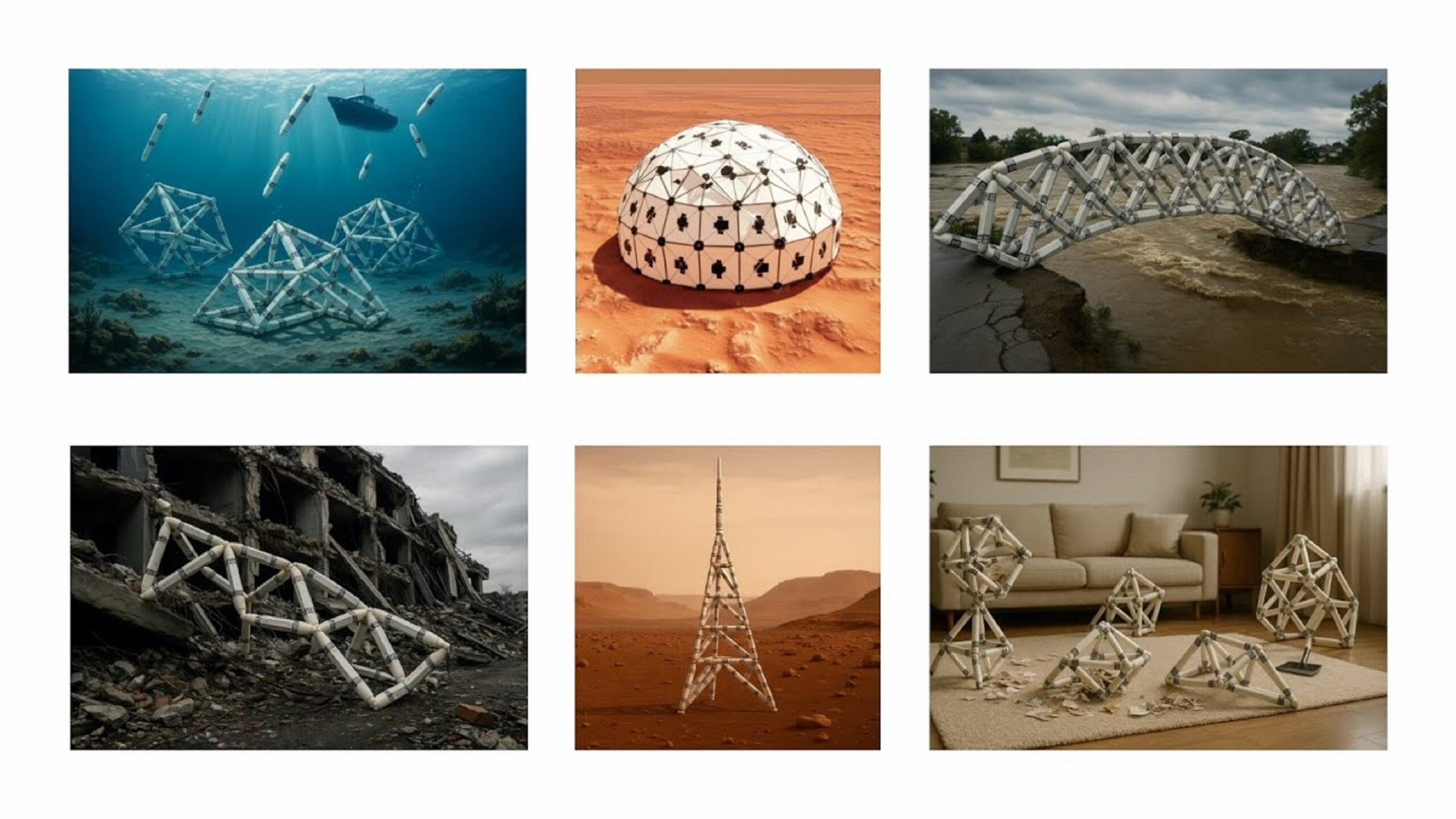
Le applicazioni di questa tecnologia sono particolarmente promettenti in contesti critici. Negli scenari di disastro, come terremoti o incidenti industriali, i robot metabolici possono operare in ambienti ostili, adattarsi ai danni subiti e continuare le operazioni di soccorso senza richiedere assistenza esterna. Nelle missioni spaziali, dove ogni grammo di materiale trasportato ha un costo elevatissimo, la capacità di autoripararsi e di utilizzare risorse locali rappresenta un vantaggio strategico. A lungo termine, tali sistemi potrebbero persino consentire a un’intelligenza artificiale di costruire infrastrutture o altri robot direttamente nello spazio, ampliando le possibilità di esplorazione autonoma.
Hod Lipson invita tuttavia alla cautela. L’idea di robot capaci di autoriprodursi evoca scenari fantascientifici, ma la sfida reale riguarda la manutenzione. Le macchine non possono dipendere costantemente dall’uomo: devono imparare a prendersi cura di sé stesse, sviluppando un’autonomia non solo funzionale ma anche strutturale. Ciò implica una revisione profonda del concetto di manutenzione, che da esterna diventa interna, basata su capacità di diagnosi e riparazione distribuite nel sistema stesso.
Dal punto di vista ingegneristico, le implicazioni sono rilevanti. La possibilità di adattarsi fisicamente alle condizioni ambientali, oltre che cognitivamente, apre scenari d’uso che spaziano dall’esplorazione spaziale alla costruzione autonoma in contesti remoti, passando per il soccorso in ambienti ostili. Per renderla scalabile, però, sarà necessario sviluppare moduli standardizzati, protocolli di comunicazione robusti e sistemi di autodiagnosi affidabili. La sfida futura sarà integrare questa capacità evolutiva in architetture sicure, efficienti e controllabili. In questo nuovo paradigma, il robot non è più un semplice esecutore di istruzioni, ma un organismo meccanico adattivo, capace di apprendere, modificarsi e sopravvivere in ambienti complessi e mutevoli.
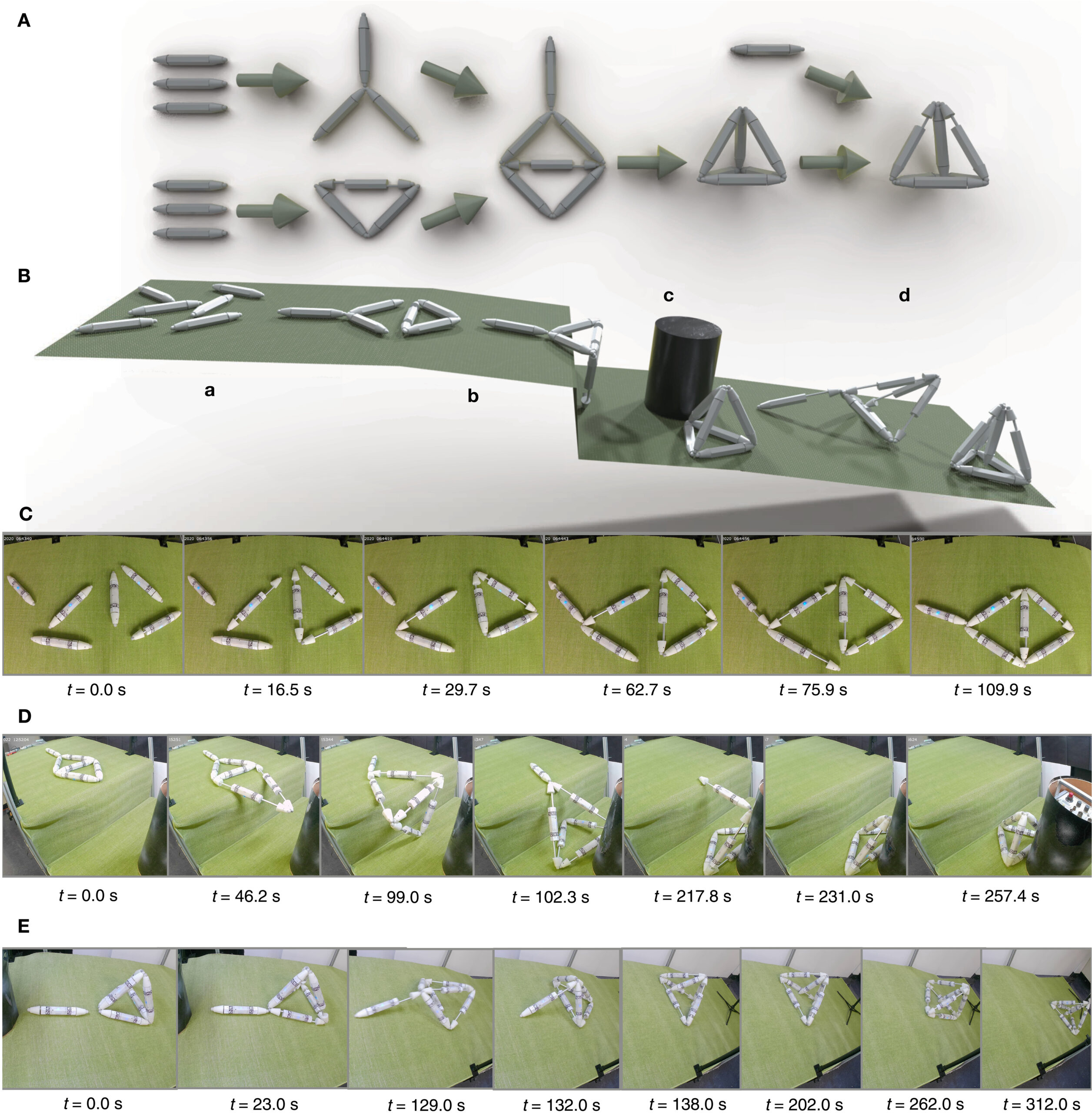
La sezione (B) mostra una vista laterale dell’ambiente sperimentale, non in scala, con etichette da (B-a) a (B-d) che indicano le aree in cui si sono verificate le diverse transizioni illustrate nelle immagini (C), (D) ed (E). Queste sequenze fotografiche documentano rispettivamente la formazione del diamante con coda, la trasformazione in robot tetraedrico e infine la configurazione finale a tetraedro con meccanismo a cricchetto.