
I ricercatori del Massachusetts Institute of Technology di Boston hanno sviluppato un approccio innovativo per la costruzione di robot sottomarini deformabili, efficienti e scalabili.
Le strutture sottomarine che possono cambiare dinamicamente le loro forme, come fanno i pesci, si spingono attraverso l’acqua in modo molto più efficiente rispetto agli scafi rigidi convenzionali. Ma costruire dispositivi deformabili in grado di modificare la curva delle loro forme corporee mantenendo un profilo liscio è un processo lungo e difficile. Il RoboTuna del MIT, ad esempio, era composto da circa 3.000 parti diverse e ci sono voluti circa due anni per progettarlo e costruirlo.
I ricercatori del MIT, incluso uno studioso del team RoboTuna originale, hanno escogitato un approccio innovativo alla costruzione di robot sottomarini deformabili, utilizzando semplici sottostrutture ripetute invece di componenti unici. Il team ha dimostrato il nuovo sistema in due diverse configurazioni, che simulano un’anguilla e l’ala di una farfalla. La metodologia messa a punto dal MIT consente variazioni virtualmente illimitate di forma e scala, affermano i ricercatori.
Il lavoro è stato riportato sulla rivista Soft Robotics, in un questo articolo del ricercatore del MIT Alfonso Parra Rubio, dei professori Michael Triantafyllou e Neil Gershenfeld e di altri sei autori.
La robotica morbida
Gli approcci esistenti alla robotica morbida per applicazioni marine sono generalmente realizzati su piccola scala, mentre molte utili applicazioni del mondo reale richiedono dispositivi su scale di metri. Il nuovo sistema modulare proposto dai ricercatori potrebbe essere facilmente esteso a tali dimensioni e oltre, senza richiedere il tipo di riorganizzazione e riprogettazione che sarebbe necessario per scalare i sistemi attuali.
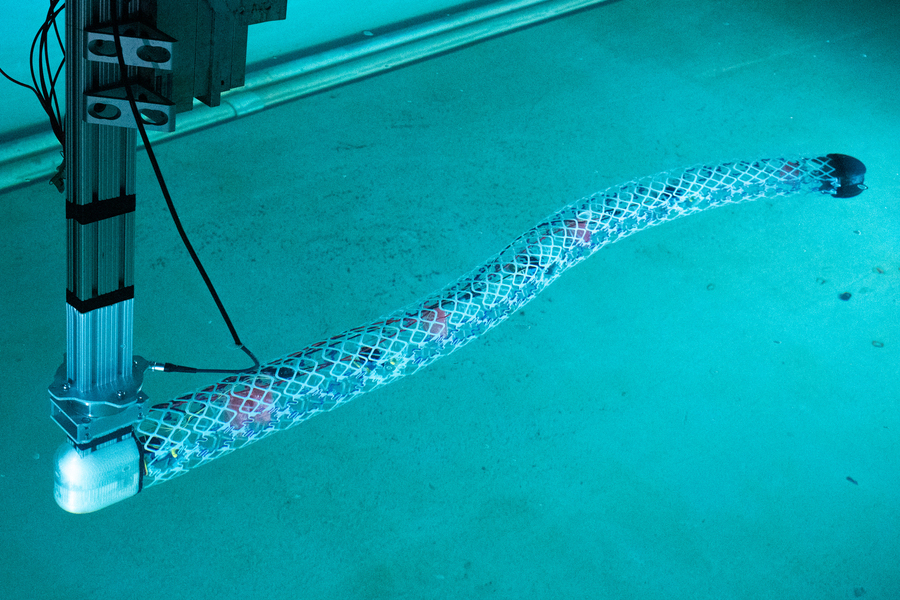
“La scalabilità è un punto di forza per noi”, afferma Parra Rubio. Data la bassa densità e l’elevata rigidità dei pezzi simili a reticoli, chiamati voxel, che compongono il loro sistema, dice, “abbiamo più spazio per continuare a crescere”, mentre la maggior parte delle tecnologie attualmente utilizzate “si basano su materiali ad alta densità di fronte problemi drastici” nel passaggio a dimensioni maggiori.
I singoli voxel nei dispositivi sperimentali e di prova del team sono per lo più strutture cave costituite da pezzi di plastica colata con montanti stretti in forme complesse. Le forme scatolari sono portanti in una direzione ma morbide in altre, una combinazione insolita ottenuta mescolando componenti rigidi e flessibili in proporzioni diverse.






