Nel progetto di macchine automatiche e sistemi robotici, il nodo strutturale è spesso l’elemento le cui caratteristiche e il cui sviluppo vengono spesso trascurati, ma che al contempo influenza in modo importante le caratteristiche dinamiche del sistema stesso. La mancata ottimizzazione dei giunti significa all’atto pratico accettare masse eccessive, accoppiamenti parassiti, concentratori di tensioni, eccetera, che riducono le prestazioni raggiungibili dal sistema. Per ovviare a questi limiti, l’unione tra le analisi numeriche attraverso l’ottimizzazione topologica e il processo innovativo dell’Additive Manufacturing metallico ha aperto la strada alla progettazione ottimizzata di questi elementi, rendendo possibili geometrie che fino a pochi anni fa erano impossibili da realizzare, o talvolta possibili ma con costi enormi.
Dai giunti convenzionali al paradigma additivo
In un telaio tridimensionale, il giunto, lo snodo, si comporta in primo luogo come l’interfaccia geometrica tra due parti consecutive, ma deve anche avere valenza strutturale. Infatti, è proprio in questi elementi in cui si concentrano i tensori di sforzo e dove si decide l’efficienza dell’intera trasmissione dei carichi e la gestione delle inerzie del sistema. Le tecnologie di giunzione tradizionali come la saldatura, chiodatura o il serraggio meccanico, introducono discontinuità locali quantificabili attraverso il fattore di concentrazione teorico Kt. Nei giunti imbullonati, i fenomeni di micro-scorrimento alle interfacce di contatto aggiungono non-linearità che limitano l’efficienza nella trasmissione dei carichi dinamici e producono effetti di fatica che possono compromettere nel tempo la resistenza del giunto stesso. Dal punto di vista analitico, il comportamento elastico del nodo si descrive con la relazione F=[K]u, dove [K] è la matrice di rigidezza del giunto. Nelle costruzioni convenzionali, questa matrice presenta sistematicamente termini fuori diagonale non nulli, indicatori di accoppiamenti parassiti che sorgono tra i diversi gradi di libertà delle parti che compongono il telaio, derivati dall’allocazione subottimale della massa imposta dai vincoli di asportazione o dallo sformo nelle lavorazioni plastiche. Il progettista è costretto ad adottare fattori di sicurezza sovrastimati, con l’inevitabile risultato di avere una massa eccessiva e anche costi maggiori.
In questo senso, l’Additive Manufacturing metallico rovescia la logica della produzione sottrattiva tradizionale proprio perché la costruzione strato per strato garantisce l’estrema libertà di gestire il volume di costruzione, consente di progettare giunti con topologie organiche capaci di allineare i percorsi di carico con la distribuzione spaziale stessa del materiale, in poche parole, è possibile mettere il materiale esattamente dove serve. Il vantaggio è misurabile dal punto di vista della cinematica del sistema attraverso il parametro chiamato rigidezza specifica E/ρ, che rappresenta il rapporto tra la rigidezza e densità del componente o di un dato sistema. Nella robotica industriale e nelle macchine a cinematica parallela, ridurre la massa dei nodi alle estremità mobili abbatte direttamente il tensore d’inerzia del sistema. L’equazione del moto [M(q)] q ̈+C(q,q ̇ ) q ̇+G(q)=τ mostra come la matrice delle masse e il vettore delle forze centrifughe dipendano dalla distribuzione della massa. Giunti più leggeri agli estremi del sistema abbassano i valori dei momenti torcenti richiesti ai servomotori, permettendo accelerazioni superiori, tempi di ciclo più brevi e vibrazioni attenuate nelle fasi di posizionamento. La definizione della morfologia migliore possibile per i diversi componenti del telaio può essere facilmente ottenuta applicando uno strumento dell’analisi numerica chiamato ottimizzazione topologica. Il problema matematico alla base di questo strumento ha come obiettivo la minimizzazione della cedevolezza elastica del componente, che equivale alla massimizzazione della rigidezza, imponendo al sistema specifici condizioni di carico, di vincolo strutturale e geometrico e di massa. La funzione obiettivo standard può essere definita come c(x)=UT KU, per la quale U è il vettore degli spostamenti globali e x il vettore delle densità relative degli elementi finiti nel dominio di progetto. Come è stato detto, al fine di ottenere un risultato consono alle specifiche condizioni di progetto, è importate applicare i vincoli in cui il sistema opererà l’ottimizzazione. Tra questi si può definire il vincolo di frazione volumetrica Σ xi·vi ≤ Vmax impone un tetto al volume di materiale utilizzabile. Per garantire che il processo non solo raggiunga la convergenza, ma che sia in gradi di presentare topologie fisicamente realizzabili, i solutori impiegano il metodo cosiddetto SIMP (Solid Isotropic Material with Penalization). Questo artificio matematico si basa sulla formula E(xi )=xipp, con p≥3 e impone così all’algoritmo di considerare solo le soluzioni binarie, per cui ogni elemento è pieno o vuoto, delineando le direzioni principali di trasferimento del carico nel nodo strutturale.
La geometria grezza risultante dal processo di ottimizzazione topologica va poi rielaborata per renderla compatibile con i processi di fusione a letto di polvere. È proprio qui che interviene il Design for Additive Manufacturing (DfAM), ovvero tutta una serie di regole ed euristiche in grado di guidare il progettista durante la fase di modellazione del sistema al fine di rendere il prodotto perfettamente adatto al processo produttivo. Il vincolo primario riguarda la gestione degli sbalzi (generalmente chiamati overhangs) per cui le superfici inferiori del giunto devono mantenere un angolo di inclinazione rispetto al piano di costruzione superiore a circa 45°, in modo da garantire che il bagno fuso sia sostenuto senza strutture di supporto sacrificali. Questo vincolo porta a garantire che la geometria in costruzione sia sempre autoportante, riducendo drasticamente il consumo di polvere e le lavorazioni di post processo. La sintesi additiva permette inoltre di unificare in un unico volume gli elementi che tradizionalmente richiedevano flange, staffe, perni, fazzoletti di irrigidimento e fissaggi filettati. Il risultato abilita anche l’integrazione di circuiti di raffreddamento interni al nodo e condotti per cablaggio di potenza, segnale o linee pneumatiche, incrementando la densità funzionale dell’intero telaio.
Metallurgia e processo
La fusione a letto di polvere opera in un regime termodinamico di non-equilibrio in cui la densità di energia volumetrica immessa dal laser è descritta dalla legge:
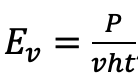
dove P è la potenza del fascio, v la velocità di scansione, h l’hatch spacing e t lo spessore dello strato. Questa concentrazione energetica genera un bagno fuso microscopico con gradienti termici molto importanti e condizioni di instabilità fluidodinamiche indotte dai moti convettivi, chiamati nella teoria, di Marangoni. La morfologia del metallo solidificato dipende dal rapporto tra il gradiente termico di interfaccia tra gli stati liquido-solido e velocità di crescita dell’interfaccia stessa. Al variare di questo parametro si passa da solidificazione planare a cellulare fino a raggiungere la formazione di strutture dendritiche. Nella pratica le condizioni di raffreddamento raggiungono velocità di scambio termico dell’ordine del 10⁵–10⁷ K/s, inducendo la formazione di grani ultrafini e fasi metastabili. Ad esempio, nelle leghe di titanio Ti-6Al-4V il rapido raffreddamento inibisce la trasformazione diffusiva della fase β cubica (BCC) e genera una microstruttura martensitica aciculare α’ esagonale (HCP), ad alta durezza ma con duttilità limitata nello stato as-built (definito come il componente appena prodotto, prima di qualunque processo termico o di finitura). La parziale rifusione degli strati sottostanti produce grani colonnari orientati lungo l’asse di costruzione Z, introducendo anisotropia delle prestazioni meccaniche, come la resistenza a trazione, limite di snervamento e modulo di Young. Questi parametri variano in funzione dell’angolo di sollecitazione rispetto al piano di stampa. Nelle leghe AlSi10Mg, largamente impegnate nell’automazione, la rapidità di solidificazione segrega il silicio ai bordi delle celle di alluminio, formando un reticolo di precipitati che ostacola il moto delle dislocazioni e porta a prestazioni meccaniche superiori rispetto alle stesse leghe gestite con processi tradizionali come la pressocolata.
Il punto critico nella realizzazione di componenti strutturali in manifattura additiva consiste nell’inevitabile generazione di tensioni residue per cui le zone del nodo restano in trazione (prossime allo snervamento) mentre il nucleo è compresso. Se non mitigate, queste tensioni causano distorsioni geometriche al distacco dalla base o cricche di delaminazione durante la stampa stessa. Prima della rimozione dalla piastra di base, si esegue pertanto un trattamento di distensione (Stress Relieving), che converte le deformazioni elastiche residue in deformazioni plastiche tramite scorrimento viscoso. Per i giunti soggetti a fatica oligociclica (Low-Cycle Fatigue) si ricorre al processo di pressatura isostatica a caldo (HIP), in cui la temperatura e la pressione idrostatica superiore ai 100 MPa chiudono per saldatura di diffusione le porosità interne dovute alle mancanze di fusione, omogeneizzando la microstruttura e ripristinandone la tenacità. La previsione accurata delle caratteristiche e delle prestazioni del nodo richiede due livelli di analisi distinte. Il primo riguarda l’analisi del campo termico transitorio generato durante il processo L-PBF, descritto dall’equazione di Fourier non lineare

dove il termine q ̇_v modella l’apporto energetico del laser, tipicamente con distribuzioni a doppio ellissoide gaussiano (modello di Goldak). Il secondo livello traduce i gradienti termici in deformazioni meccaniche. L’equazione di bilancio della quantità di moto è ∇σ+b=ρu ̈, chiusa dalle relazioni costitutive elasto-plastiche anisotrope dσ=Cep:dε, dove Cᵉᵖ è il tensore di rigidezza tangente di quarto ordine. Poiché il telaio è composto da numerosi corpi, i parametri necessari alle equazioni sopra descritte, come la matrice di rigidezza elastica, la matrice di smorzamento e la matrice delle masse coerenti, posso essere estratte solamente tramite l’ausilio di modelli numerici a elementi finiti (FEM). Dal punto di vista pratico, le metodologie si biforcano in due approcci. Le analisi transitorie accoppiate risolvono iterativamente temperatura e spostamenti per ogni incremento temporale e ogni traiettoria di scansione, restituendo una mappatura ad alta fedeltà delle tensioni residue, ma con tempi computazionali elevati. Il metodo delle deformazioni intrinseche (Inherent Strain Method) mappa invece una distorsione plastica pre-calcolata εin su interi strati macroscopici, permettendo la predizione rapida delle distorsioni globali attraverso la relazione ∇(C:(ε-εin ))=0. Questa calibrazione preventiva è fondamentale per applicare la compensazione geometrica al modello CAD, cosicché, dopo il ritiro termoplastico e la rimozione dei supporti, il componente rientri nelle tolleranze di progetto.
La stampa metallica restituisce superfici con rugosità dell’ordine delle decine di micrometri, incompatibili con gli accoppiamenti di precisione. Il percorso dal semilavorato additivo all’elemento funzionale richiede lavorazioni successive di finitura, tramite fresatura, tornitura e barenatura, per esempio delle sedi per cuscinetti volventi, sui perni di centraggio, o per realizzare le sedi delle guide lineari, o le interfacce delle flange. Per garantire l’allineamento spaziale dei centri di rotazione, nella geometria additiva vengono integrate datum features sacrificali, che possono essere delle sfere o spianature di riferimento, che consentono il corretto azzeramento degli assi della macchina operatrice, per essere poi asportate al termine delle lavorazioni.
I giunti per sistemi automatici ad alta dinamica sono soggetti a spettri di carico molto importanti. La vita utile del componente sottoposti a fatica oligociclica (Low-Cycle Fatigue) è descrivibile con la relazione di Coffin-Manson:
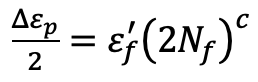
dove ε’f è il coefficiente di duttilità a fatica, Nf rappresenta il numero di inversioni a rottura e c è l’esponente di duttilità. Le valli del profilo di rugosità superficiale agiscono come intagli naturali che innalzano il fattore di concentrazione degli sforzi a fatica Kf, fornendo siti preferenziali per la nucleazione precoce delle cricche. Dove la geometria del pezzo impedisce la lavorazione meccanica delle superfici, le regioni in cui si stima la massima concentrazione di sforzi vengono sottoposte a processi come lo shot peening (la deformazione plastica superficiale induce uno strato di tensioni residue di compressione che inibisce la propagazione della frattura). La geometria reticolare dei giunti ottimizzati rende però inapplicabili le tecniche di ispezione convenzionali a ultrasuoni o radiografia bidimensionale, è necessario quindi adottare la tomografia computerizzata a raggi X (XCT), in grado di ricostruire il volume tridimensionale sfruttando l’attenuazione fotonica secondo la legge di Lambert-Beer I=I0 e-μx. Attraverso particolari algoritmi, le proiezioni acquisite durante la rotazione del campione producono una matrice ad alta risoluzione. La XCT è l’unico strumento in grado di quantificare la frazione volumetrica delle microporosità residue, mappare le mancanze di fusione tra strati adiacenti e verificare i canali interni.
Conclusione
Svincolando la generazione della forma dai limiti degli utensili da taglio, la progettazione di nodi tramite Additive Manufacturing metallico permette di ridefinirne le caratteristiche, passando da semplice elemento di connessione a elemento funzionale per garantire stabilità ed efficienza del sistema automatico. L’integrazione tra processi, materiali e sistemi per il controllo qualità sempre più efficaci apre la strada alla realizzazione di robot e macchine automatiche più leggere, stabili ed efficienti rispetto a qualunque soluzione convenzionale.