Dalla criticità di campo alla soluzione ingegneristica: un caso reale.
di Luigi Pasquali
Il problema: quando la struttura diventa il veicolo del danno
In molte macchine automatiche, il sensore finecorsa è fissato rigidamente al telaio tramite una staffa: una scelta apparentemente robusta che può però trasformarsi in un punto debole. Durante i test prototipali del sistema in esame è emerso un comportamento critico: al raggiungimento della fine corsa, l’equipaggio mobile — pur fortemente decelerato — generava impulsi vibrazionali che si propagavano nel telaio fino a danneggiare il sensore.
Da qui l’esigenza: disaccoppiare dinamicamente il sensore dalla struttura, senza introdurre complessità o costi rilevanti.
L’idea: trasformare un vincolo rigido in un sistema elastico
La soluzione è stata concettualmente semplice ma tecnicamente raffinata: interporre una sospensione elastica tra telaio e sensore, capace di attenuare — o idealmente isolare — le vibrazioni indotte dagli impatti dell’equipaggio mobile a fine corsa.
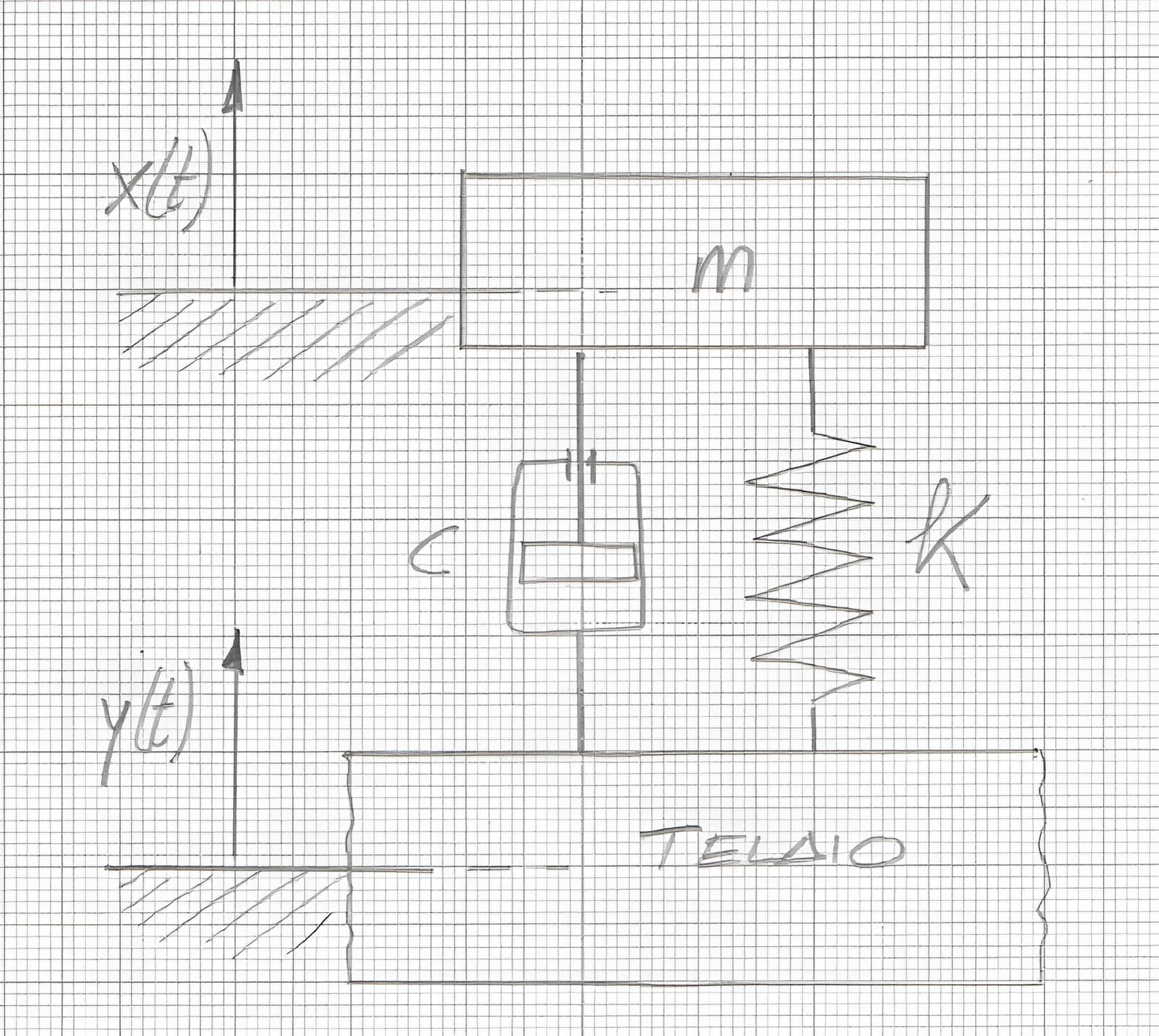
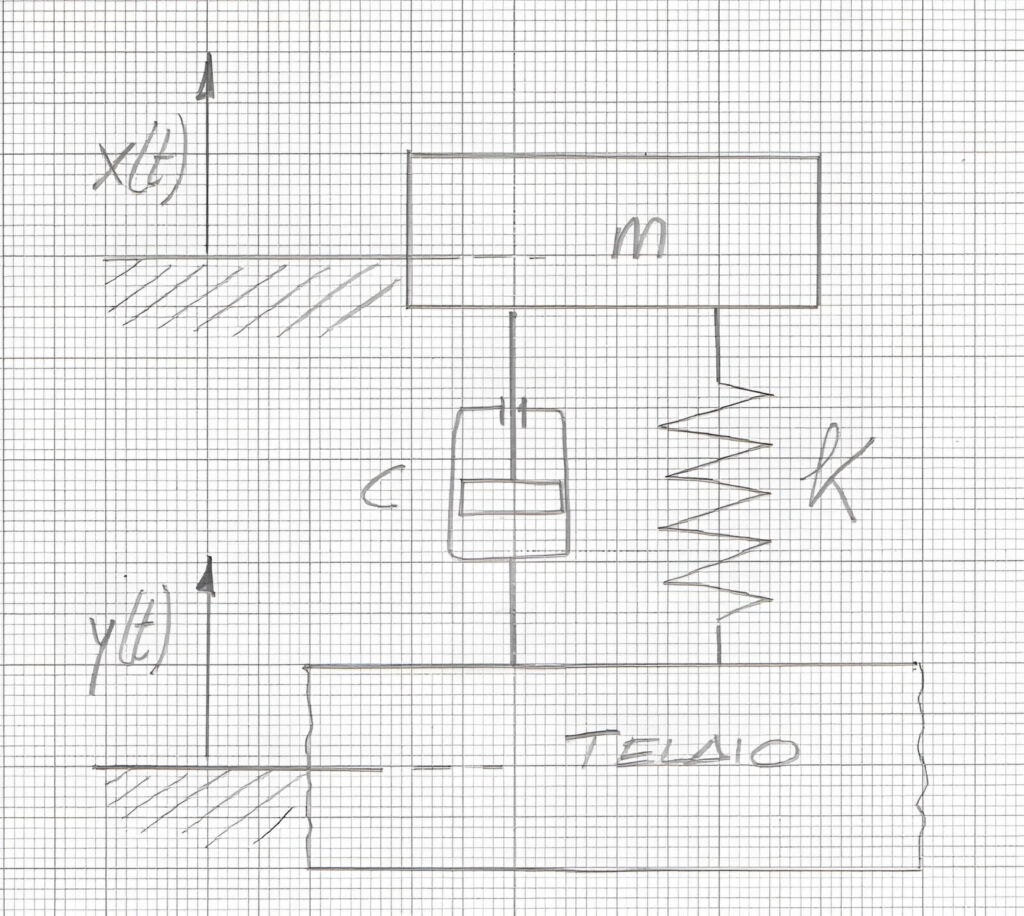
Per il dimensionamento si è fatto ricorso a una modellazione a parametri concentrati, schematizzando il sistema come una massa m collegata a una rigidezza k, soggetta a eccitazione alla base. Lo smorzamento c, pur presente nel sistema reale, non è stato esplicitamente modellato nella trattazione analitica.
L’obiettivo progettuale è rendere il sistema poco sensibile alla frequenza di eccitazione, minimizzando le accelerazioni massime a cui è sottoposto il sensore.
Il principio fisico: isolamento per disaccoppiamento dinamico
La pulsazione naturale del sistema è:
Dalla teoria dei sistemi vibranti [1] si ricava che, per ottenere una significativa riduzione dell’ampiezza di oscillazione della massa rispetto a quella della base, è necessario operare in regime di isolamento dinamico:
Concretamente, tale condizione viene generalmente espressa adottando come criterio progettuale:
Assumendo in via conservativa:
si ottiene:

In questo regime, la massa m oscilla con ampiezza significativamente ridotta rispetto a quella del telaio.
Caratterizzazione sperimentale dell’eccitazione
Per dimensionare correttamente il sistema è stata preliminarmente misurata l’eccitazione reale.
L’analisi è stata condotta lungo l’asse di interesse (asse Z) mediante un “sensore equivalente”: un blocchetto in alluminio strumentato con accelerometro, con massa complessiva equivalente a quella del sensore reale [2].
Le misure delle vibrazioni generate dagli impatti dell’equipaggio mobile hanno fornito:
– la frequenza dominante dell’eccitazione ω
– i picchi di accelerazione, dell’ordine di circa 20 g
Questi dati hanno costituito l’input fondamentale per il progetto.
Determinazione della rigidezza k
Nota la massa m e fissato il rapporto ω/ω_n, è stata determinata la pulsazione propria desiderata e quindi la rigidezza richiesta del sistema elastico.
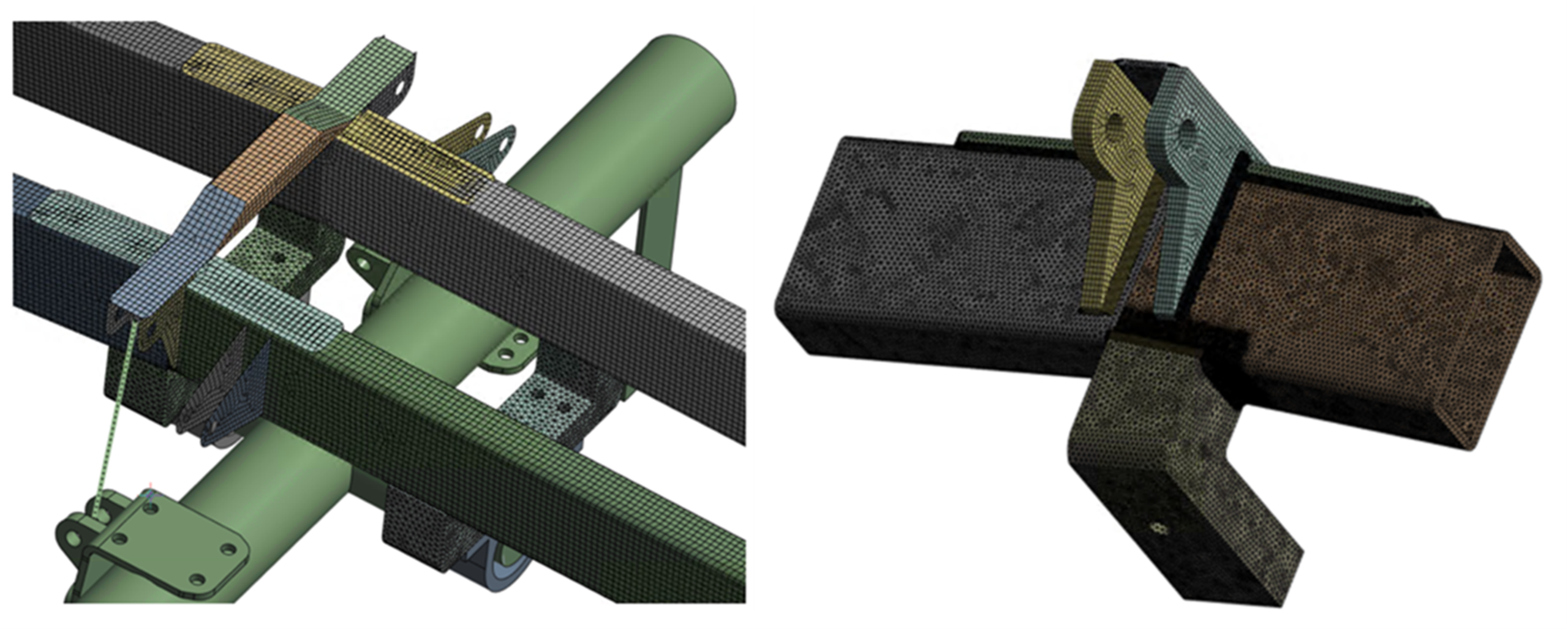
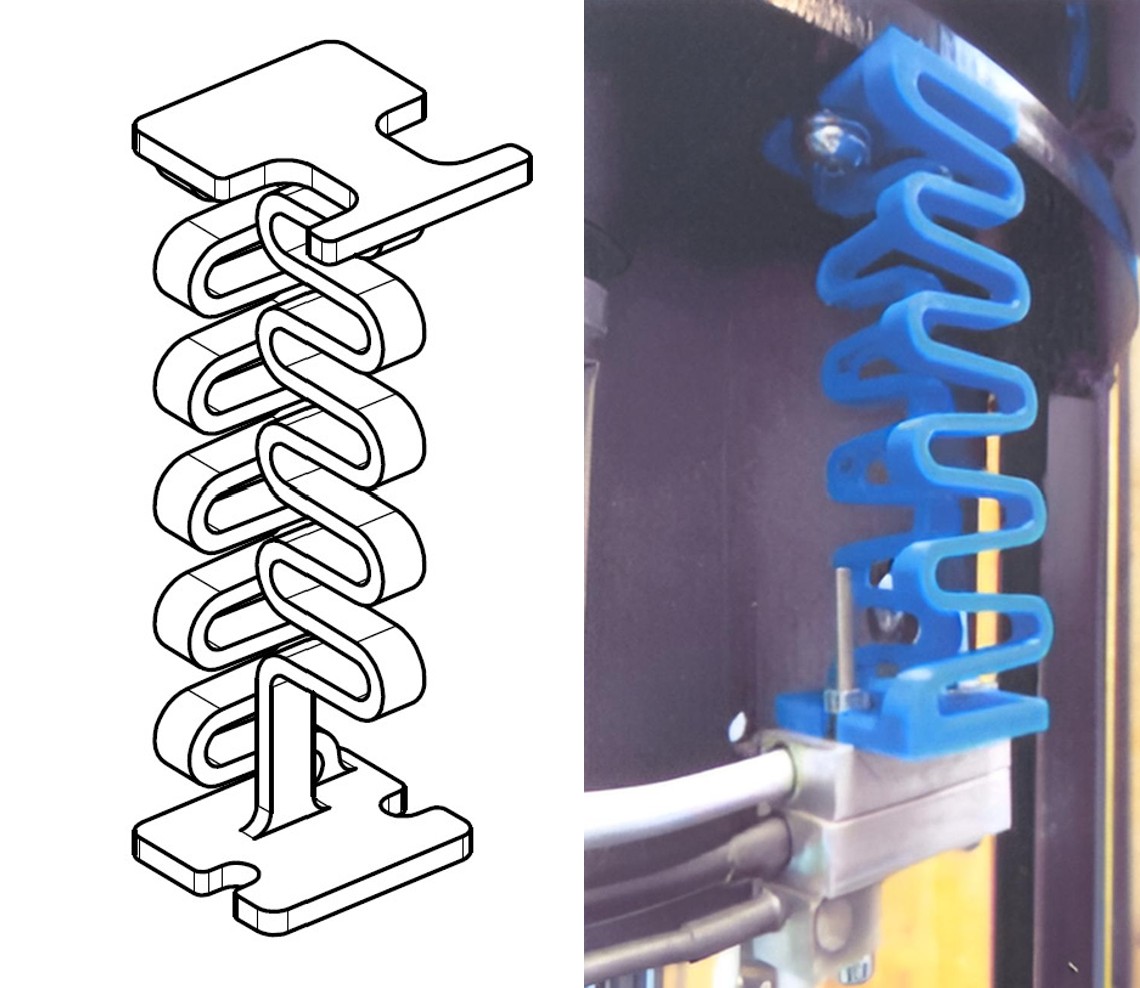
Una molla “non convenzionale”: la staffa elastica in polimero
In luogo di una molla tradizionale — che avrebbe richiesto l’introduzione di una guida dedicata, aumentando la complessità del sistema — si è optato per una soluzione integrata: una staffa in materiale polimerico con funzione elastica.
La geometria è stata progettata per coniugare:
- bassa rigidezza locale (per ottenere il valore di k desiderato);
- adeguata rigidezza globale (per garantire stabilità e precisione di posizionamento)
La configurazione adottata, a doppia losanga su piani ortogonali, consente di:
- lavorare in flessione controllata
- distribuire le deformazioni
- mantenere stabilità geometrica in 3D
Validazione numerica e prototipazione
Il dimensionamento è stato raffinato mediante:
- simulazioni FEM in campo elastico
- analisi parametrica di:
- spessori
- lunghezze caratteristiche
- “numero equivalente di spire”
Individuata la configurazione ottimale, è stato realizzato un prototipo tramite additive manufacturing e sono state ripetute le misure accelerometriche lungo l’asse Z.
Il risultato è stato una significativa riduzione dei picchi di accelerazione di un fattore 5 rispetto alla configurazione rigida iniziale.
Industrializzazione e risultati sul campo
La soluzione definitiva è stata realizzata in POM (poliossimetilene), materiale scelto per:
- stabilità dimensionale
- buone proprietà elastiche
- resistenza a fatica
Nel funzionamento reale della macchina:
- il sensore non ha più mostrato criticità
- sono stati eliminati i danneggiamenti riscontrati in fase prototipale
- è stata mantenuta la semplicità costruttiva, con costi contenuti
Conclusione: ingegneria “leggera”, impatto elevato
Questo caso dimostra come una corretta lettura del fenomeno fisico — unita a modellazione essenziale e sperimentazione mirata — possa portare a soluzioni estremamente efficaci.
Non una molla aggiunta, ma una funzione elastica integrata nella geometria.
Non isolamento perfetto, ma disaccoppiamento intelligente.
È spesso in questo spazio progettuale che l’ingegneria esprime il suo massimo potenziale: trasformare un problema invisibile, come quello delle vibrazioni, in una soluzione elegante, robusta e replicabile in contesti analoghi.
Note
[1] E. Funaioli, A. Maggiore, U. Meneghetti, Lezioni di meccanica applicata alle macchine, Vol. II, pp. 77–80 [2] la massa dell’accelerometro, infatti, non è trascurabile rispetto a quella del sensore.