Il “field-programmable robotic folding sheet” sviluppato dal KAIST introduce un nuovo approccio alla progettazione meccanica e ai sistemi di controllo, basato su strutture programmabili e sul principio dell’intelligenza morfologica.
La robotica si sta estendendo oltre gli ambienti strutturati dei laboratori e delle catene di montaggio, per affrontare contesti imprevedibili come le operazioni di soccorso, l’esplorazione planetaria e la manutenzione in luoghi inaccessibili. In questi ambienti, la capacità di adattarsi in tempo reale a ostacoli, superfici irregolari e condizioni ambientali mutevoli diventa cruciale. I robot tradizionali, basati su schemi di movimento rigidi e connessioni meccaniche fisse, faticano a garantire la versatilità necessaria in contesti così dinamici.
Parallelamente, i progressi nei materiali intelligenti e nei metodi di progettazione computazionale hanno aperto la strada a dispositivi in grado di sfruttare direttamente la loro conformazione fisica per eseguire compiti complessi. Il paradigma dell’intelligenza morfologica propone di spostare parte del calcolo dallo spazio elettronico a quello meccanico, utilizzando la geometria e le proprietà intrinseche dei materiali per semplificare il controllo e migliorare l’efficienza energetica.
KAIST (Korea Advanced Institute of Science and Technology), fondato a Daejeon (Corea del Sud) nel 1971, è il principale centro di ricerca sudcoreano in ingegneria e scienze applicate. Con oltre 15 000 studenti e numerosi laboratori d’avanguardia, KAIST è riconosciuto a livello mondiale per le sue ricerche in robotica avanzata, materiali funzionali e intelligenza artificiale. Proprio qui il team guidato dai professori Jung Kim e Inkyu Park ha dato vita a un progetto capace di coniugare flessibilità strutturale e intelligenza distribuita: un foglio robotico pieghevole programmabile direttamente sul campo.
La struttura integra un substrato polimerico flessibile con una rete di micro-resistori metallici che fungono sia da attuatori termici sia da sensori di temperatura, consentendo il controllo della piegatura senza l’impiego di attuatori meccanici esterni aggiuntivi. Il sistema software utilizza reti neurali profonde e algoritmi per mappare i parametri di piegatura (posizione, direzione e intensità) in precise sequenze termiche (riscaldamento e raffreddamento), ottenendo così la forma desiderata.
Questa programmabilità sul campo permette una riconfigurazione rapida e precisa, andando oltre i limiti delle tecnologie termiche convenzionali. Non vincolato a una geometria fissa, il foglio robotico si adatta dinamicamente a compiti e ambienti diversi. Nasce così il concetto di intelligenza morfologica, in cui la forma stessa diventa un elemento attivo del comportamento robotico, capace di reagire in modo intelligente alle sollecitazioni esterne.
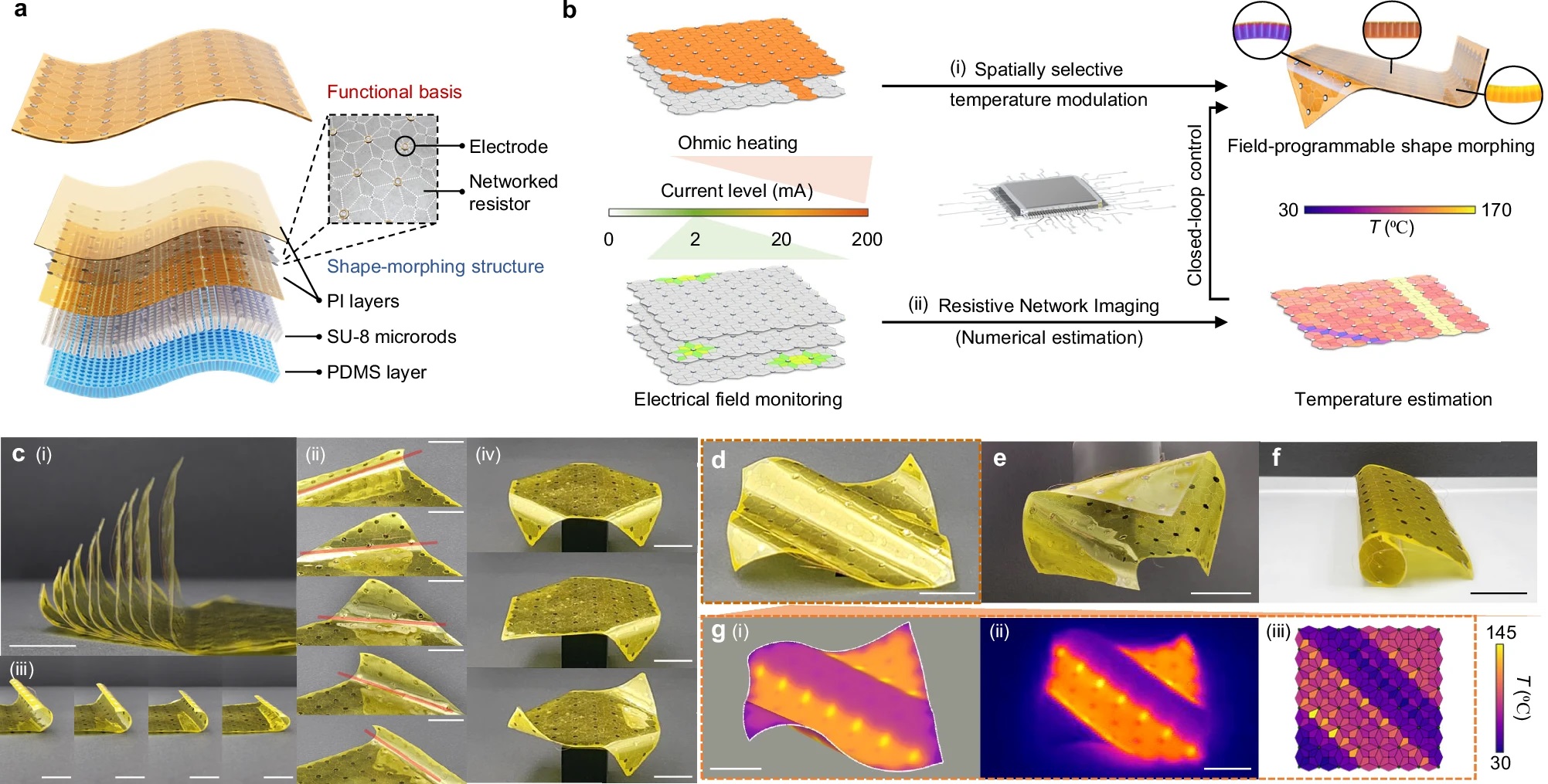
b) Illustrazione schematica dell’architettura computazionale che (i) attiva, (ii) rileva e (iii) controlla a ciclo chiuso la distribuzione della temperatura (T) per programmare la piegatura termo-sensibile.
c) Dimostrazione della programmabilità sul campo della piegatura: la regione di piega viene traslata (i), ruotata (ii) e accumulata per ottenere la piegatura (iii), insieme al controllo della direzionalità della piega (iv). In c(ii), la linea rossa indica l’asse principale della piega. Barre di scala: 15 mm.
d–f ) L’elevato grado di libertà nella programmazione della forma consente la realizzazione di configurazioni complesse, tra cui un motivo ondulato (d), strutture multi-piega con orientamenti differenti (e) e configurazioni di rotolamento (f).
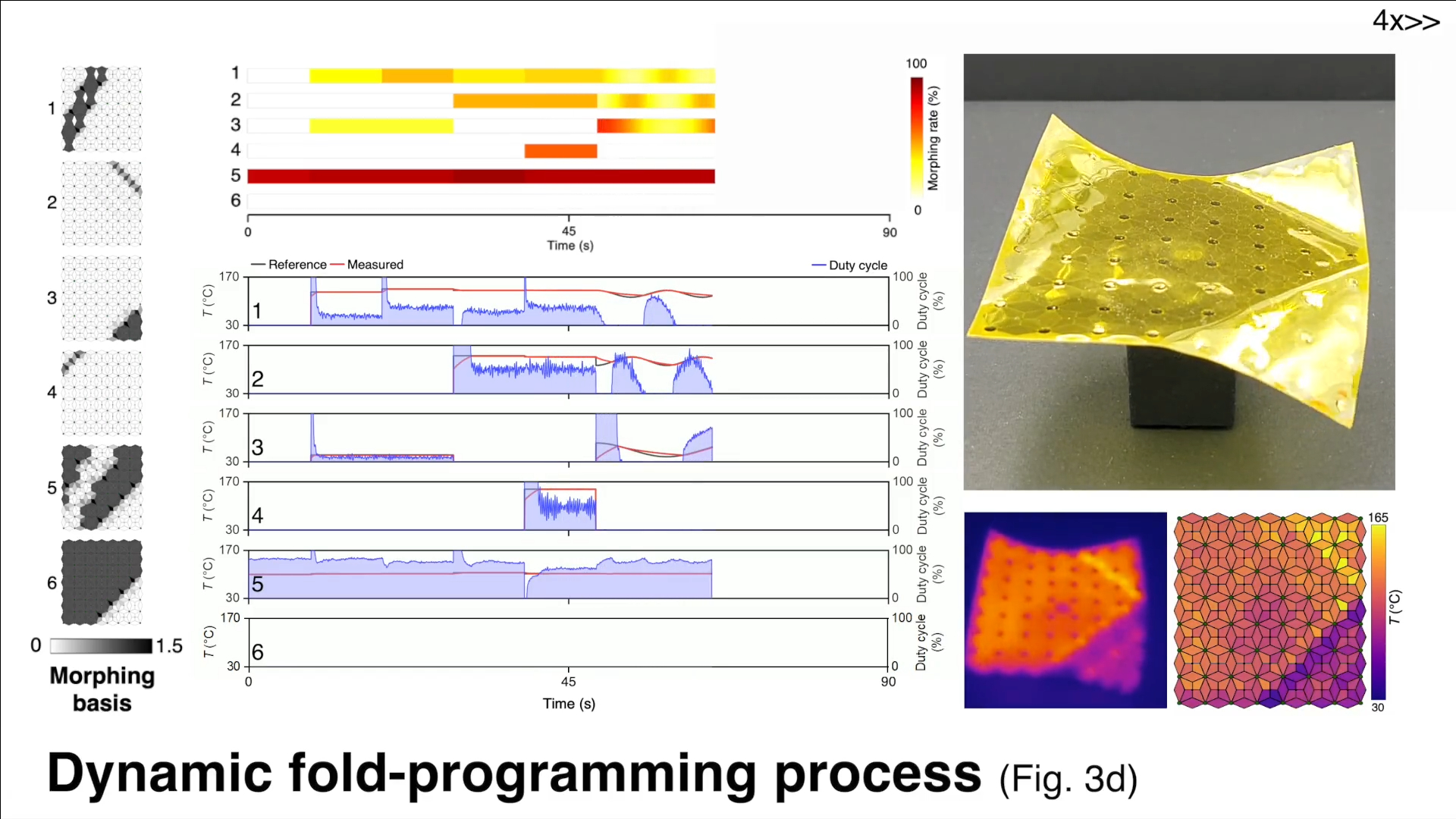
g) Analisi del processo di programmazione della forma mediante simulazioni agli elementi finiti (i), misurazioni con termocamera a infrarossi (ii) e stima della temperatura tramite RNI (iii).
Architettura integrata e controllo termico adattivo
Il foglio robotico si distingue per un’architettura che unisce materiali avanzati e algoritmi di controllo in un’unica piattaforma. I micro-resistori metallici integrati nel substrato fungono da attuatori termici e da sensori di temperatura: generano calore per indurre la piegatura e monitorano in tempo reale il profilo termico, implementando un controllo a ciclo chiuso basato sul feedback termico. Questo meccanismo è fondamentale per compensare variazioni ambientali e garantire movimenti coerenti e ripetibili.
Il substrato polimerico flessibile è progettato per sopportare numerosi cicli di deformazione e per abilitare piegature multiassiali senza fatica meccanica. La combinazione di conducibilità termica, elasticità e resistenza meccanica è ottimizzata per mantenere prestazioni costanti nel tempo. L’eliminazione di componenti meccanici tradizionali riduce peso e ingombro, semplificando l’integrazione in robot esistenti e favorendo applicazioni industriali, mediche e aerospaziali.
Il software di controllo sfrutta due paradigmi complementari: apprendimento supervisionato e ottimizzazione evolutiva. Una rete neurale profonda analizza i dati termici e morfologici del foglio, mentre un algoritmo genetico esplora lo spazio delle configurazioni per individuare la sequenza di attivazione più efficiente. Questo approccio ibrido assicura reazioni rapide e adattive a perturbazioni esterne o variazioni di carico, mantenendo stabilità e precisione operativa durante la trasformazione.
Questo approccio sposta radicalmente il baricentro del controllo robotico: se nei sistemi tradizionali il ‘cervello’ elettronico deve sovrintendere a ogni singolo movimento di giunture rigide, nel progetto KAIST è la struttura stessa a ‘risolvere’ parte del problema meccanico. L’intelligenza fisica distribuita permette al foglio di reagire a sollecitazioni impreviste (come un urto o una variazione di pressione) in modo passivo e immediato, riducendo il carico di controllo centralizzato e migliorando l’efficienza complessiva del sistema.
Dimostrazioni applicative e potenziale funzionale
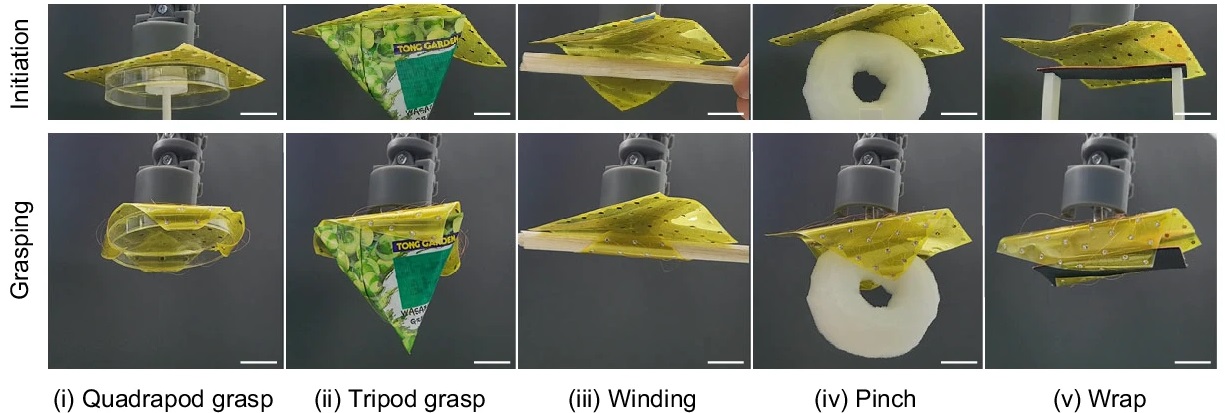
Dalla teoria del calcolo morfologico si passa così alla validazione pratica: l’applicazione pratica in scenari dove la teoria incontra la complessità del mondo reale. Il team del KAIST ha messo alla prova il foglio spingendolo verso compiti diametralmente opposti, trasformandolo istantaneamente da strumento di precisione a veicolo autonomo. Due dimostrazioni pratiche evidenziano la versatilità del sistema: una mano robotica adattiva e un sistema di locomozione bioispirato.
Nel primo caso, il foglio è stato configurato come gripper in grado di modificare la propria strategia di presa in funzione della geometria dell’oggetto. Questo risultato è stato ottenuto senza modificare l’hardware, ma semplicemente riprogrammando la sequenza di piegatura.
La capacità di adattamento morfologico consente una manipolazione precisa e sicura di oggetti con forme e dimensioni variabili. Nel secondo scenario, il foglio è stato posizionato a terra e programmato per eseguire movimenti di camminata e strisciamento.
Questa locomozione bioispirata sfrutta la sequenza di piegature per generare propulsione, simulando il comportamento di organismi naturali. La dimostrazione evidenzia il potenziale del sistema per applicazioni in robotica autonoma, dove la capacità di adattarsi al terreno e agli ostacoli è cruciale.
Forma come funzione
Il foglio robotico pieghevole sviluppato da KAIST incarna un principio ingegneristico emergente: la forma come vettore di intelligenza. In questo paradigma, la geometria non è più un vincolo statico, ma una variabile dinamica che può essere modificata per rispondere a esigenze funzionali. La forma diventa un linguaggio operativo, in cui ogni piegatura rappresenta una “unità semantica” che contribuisce al comportamento globale del sistema. Questo approccio si ispira alla biologia, dove la morfologia degli organismi è strettamente legata alla loro funzione e capacità di adattamento.
Nel foglio robotico, la forma è programmabile in tempo reale e può essere riconfigurata per eseguire compiti diversi, senza modifiche hardware. Questo consente una riduzione drastica della complessità meccanica e una maggiore efficienza energetica. Inoltre, la possibilità di codificare comportamenti attraverso la geometria apre nuove prospettive nella robotica cognitiva, dove la forma stessa può essere utilizzata per elaborare informazioni e prendere decisioni. L’intelligenza morfologica, in questo contesto, non è solo una metafora, ma una strategia ingegneristica concreta.
Uno degli aspetti più innovativi del progetto KAIST è l’integrazione tra apprendimento automatico e ottimizzazione evolutiva per la gestione della forma. Il sistema utilizza una rete neurale profonda addestrata su un ampio set di dati termici e geometrici, che consente di correlare pattern di attivazione con risultati morfologici. Questo permette al foglio robotico di apprendere nel tempo, migliorando la precisione e la rapidità di risposta. L’algoritmo genetico, invece, esplora lo spazio delle configurazioni possibili, selezionando quelle che meglio rispondono ai criteri imposti dall’utente.
Questa sinergia tra apprendimento e evoluzione consente al foglio di adattarsi non solo a compiti nuovi, ma anche a condizioni ambientali mutevoli. Il sistema può migliorare nel tempo la correlazione tra pattern termici e risultati morfologici. Questo tipo di apprendimento rappresenta una frontiera emergente nella robotica, in cui la forma non è più un vincolo progettuale, ma una risorsa da ottimizzare. Il foglio robotico dimostra che è possibile costruire dispositivi che apprendono attraverso la trasformazione fisica, riducendo la dipendenza da componenti elettronici e meccanici complessi.
Prospettive, Sfide Etiche e Scalabilità
Uno degli aspetti più promettenti del foglio robotico è la sua flessibilità. La struttura modulare consente di realizzare dispositivi di dimensioni e forme diverse, mantenendo invariata l’architettura funzionale. Questo principio può essere applicato a micro-dispositivi per uso medico o a strutture di grandi dimensioni aprendo prospettive future in applicazioni industriali, mediche e aerospaziali. La modularità facilita anche la manutenzione e l’aggiornamento, permettendo di sostituire o riprogrammare singole sezioni senza intervenire sull’intero sistema.
In ambito clinico, questo approccio permette di ipotizzare lo sviluppo di strumenti chirurgici minimamente invasivi. Ad esempio, si potrebbero realizzare stent intelligenti o sonde capaci di variare la propria rigidità e forma per adattarsi perfettamente alla struttura dei vasi sanguigni, riducendo drasticamente il rischio di traumi durante la navigazione endoscopica. Similmente, nel settore aerospaziale, la possibilità di stivare i robot in forma piatta risolve i vincoli di volume dei vettori di lancio. Una volta in orbita, queste strutture potrebbero dispiegarsi autonomamente per formare vaste superfici riflettenti, moduli abitativi riconfigurabili o vele solari, ottimizzando i costi logistici e la flessibilità delle missioni a lungo raggio.
La possibilità di integrare più fogli robotici in una rete cooperativa apre scenari interessanti per la robotica swarm e per la costruzione di superfici intelligenti. Ogni foglio può agire autonomamente o in sinergia con altri, condividendo informazioni e coordinando le trasformazioni morfologiche. Questo tipo di architettura distribuita è ideale per ambienti complessi, dove la flessibilità e la ridondanza sono essenziali.
Dal punto di vista etico, la capacità di trasformarsi e adattarsi in modo autonomo introduce nuove riflessioni sul ruolo dei robot nella società. La forma diventa parte integrante del processo decisionale, sollevando interrogativi sulla responsabilità progettuale e sull’autonomia funzionale. Le future direzioni di ricerca includono l’integrazione con materiali intelligenti, lo sviluppo di interfacce uomo-macchina intuitive e l’esplorazione di dispositivi ibridi capaci di interagire con tessuti viventi o ambienti naturali.
In definitiva, il lavoro del KAIST non segna solo la nascita di un nuovo dispositivo, ma l’inizio di un’era in cui la distinzione tra software e hardware diventa sfocata. Sostituendo motori e ingranaggi pesanti con la programmabilità termica della materia, la robotica si avvia verso una nuova sostenibilità: macchine più leggere, più semplici da riciclare e intrinsecamente capaci di evolvere attraverso la loro stessa forma. Il foglio robotico non sarebbe più solo uno strumento, ma una risorsa adattiva aprendo nuove possibilità per l’esplorazione e le tecnologie future.