

Analisi tecnica dell’impiego del robot Figure 02 nel contesto della iFACTORY BMW.
di Lisa Borreani
BMW ha avviato una collaborazione strategica con la startup californiana Figure AI per testare l’integrazione operativa di un robot umanoide all’interno di uno stabilimento automobilistico. Il sito prescelto per questo progetto pionieristico è lo stabilimento BMW Manufacturing Co. di Spartanburg, South Carolina, il più grande impianto di produzione della casa tedesca al di fuori dell’Europa, dove vengono assemblati modelli della serie X (X3, X4, X5, X6, X7 e XM). L’iniziativa si inserisce nel più ampio programma “BMW iFactory”, la visione industriale del gruppo bavarese orientata alla digitalizzazione, flessibilità e sostenibilità dei processi produttivi.
Il protagonista del progetto è Figure 02, il primo robot umanoide a essere impiegato in un ambiente industriale reale in funzione operativa. Il programma pilota prevede che il robot venga assegnato a task specifici lungo la catena di montaggio, con l’obiettivo di migliorare l’efficienza operativa e ridurre la pressione fisica sugli operatori umani, delegando al robot compiti ripetitivi, monotoni o gravosi. I test iniziali si sono concentrati sulla manipolazione di componenti in lamiera, includendo attività di presa, trasporto e posizionamento, che richiedono un’elevata precisione e capacità di adattamento dinamico. Milan Nedeljković, membro del Board of Management di BMW AG per la Produzione, ha sottolineato come i robot umanoidi rappresentino una nuova frontiera per incrementare flessibilità, sicurezza ed efficienza nel contesto produttivo, in un’ottica di coesistenza uomo-macchina.
Nedeljković ha precisato che l’obiettivo è “accompagnare questa tecnologia dallo sviluppo fino all’industrializzazione” tramite l’iniziativa iFACTORY , che promuove una produzione innovativa, digitale e sostenibile.
Caratteristiche tecniche e architettura dei robot
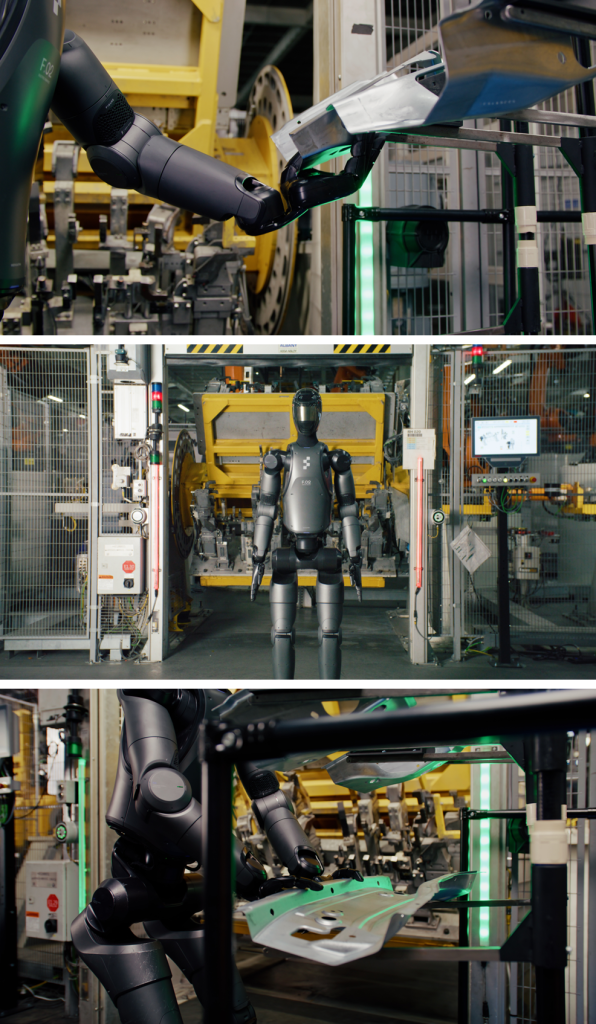
Figure 02 è un robot umanoide bipede a grandezza naturale sviluppato da Figure AI, con un’altezza di circa 1,70 metri e un peso operativo di 60-70 kg, progettato per operare in ambienti umani senza necessità di riconfigurazione degli spazi. La struttura meccanica è costituita da una combinazione di materiali compositi leggeri e leghe metalliche ad alta resistenza, per garantire robustezza e capacità dinamica. Le articolazioni motorizzate, basate su attuatori elettrici custom, offrono 25 gradi di libertà totali, con particolare enfasi su mani antropomorfe a 16 DOF (Degrees of Freedom), capaci di afferrare oggetti deformabili, superfici irregolari e strumenti da lavoro.
Il robot è dotato di una batteria agli ioni di litio ad alta densità energetica, che garantisce circa 5 ore di autonomia continua sotto carico operativo standard. Per la percezione ambientale, integra un array di telecamere RGB, LiDAR e sensori di profondità stereoscopici, combinati a un sistema visivo gestito da reti neurali convoluzionali che abilitano il riconoscimento 3D in tempo reale. Il sistema di elaborazione centrale si basa su un’architettura multimodale, che fonde segnali visivi, audio, tattili e di forza, abilitando il controllo motorio fine e l’interazione vocale.
Figure 02 è in grado di navigare su superfici irregolari, salire gradini, aprire porte, manovrare utensili elettrici e cooperare in ambienti condivisi con esseri umani. Le sue capacità cognitive sono supportate da un LLM (Large Language Model) addestrato per comprendere istruzioni verbali contestualizzate, affiancato da modelli di reinforcement learning per la pianificazione autonoma di task. La sensibilità al contatto e al carico applicato è gestita tramite sensori di coppia e un controllo a retroazione chiusa, rendendolo idoneo anche alla manipolazione di oggetti fragili. La comunicazione uomo-robot avviene tramite microfono direzionale e altoparlanti integrati, con supporto al riconoscimento vocale e feedback immediato.
Innovazioni tecnologiche rivoluzionarie
Figure 02 rappresenta un avanzamento radicale rispetto ai precedenti robot umanoidi, per concezione e finalità. A differenza di altri sistemi sviluppati per scopi sperimentali o dimostrativi, è stato progettato sin dall’inizio per applicazioni industriali commerciali. L’architettura modulare consente l’integrazione rapida in linee di produzione esistenti, senza dover rivedere l’ambiente o creare celle robotizzate isolate. Ogni segmento (arti, visione, linguaggio, apprendimento) è aggiornabile in modo indipendente, favorendo una manutenzione predittiva e una scalabilità efficace.
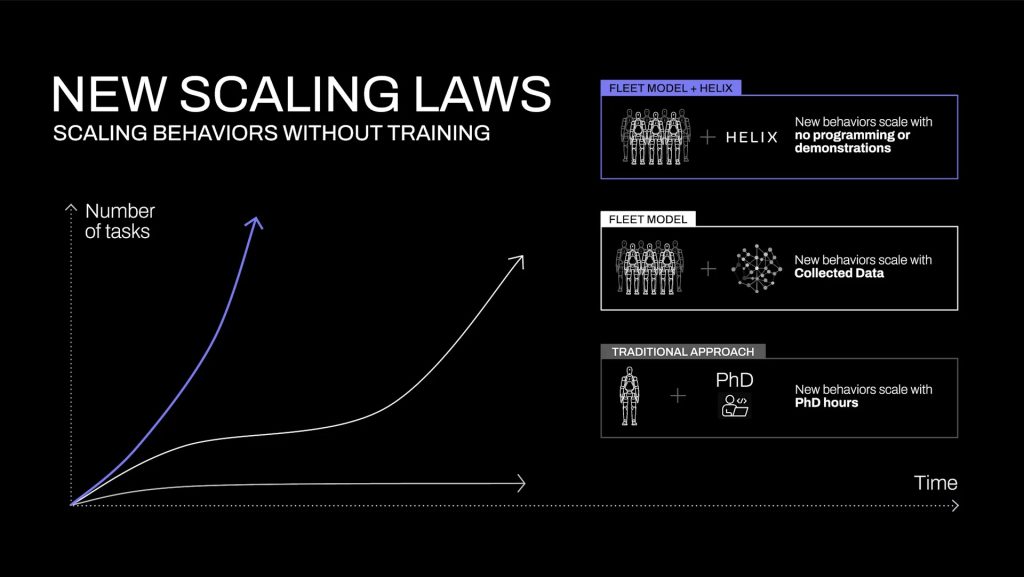
Uno degli elementi più innovativi è la capacità del robot di apprendere compiti complessi attraverso dimostrazioni dirette o istruzioni in linguaggio naturale. Durante i test con BMW, Figure 02 ha eseguito autonomamente il riconoscimento di un componente metallico, il suo sollevamento in condizioni dinamiche, il trasporto e il corretto inserimento in una fixture, adattandosi in tempo reale alle variazioni di orientamento e posizione. Tutto ciò è stato ottenuto senza alcuna riprogrammazione esplicita, grazie alla combinazione di deep learning, pianificazione probabilistica e controllo predittivo.
La progettazione ha seguito criteri di robustezza meccanica, sicurezza intrinseca (limiti di forza e velocità automatica in ambienti umani), con un design orientato all’ergonomia del contatto. Figure AI prevede una produzione in scala con robot destinati a settori strategici come logistica, assistenza sanitaria e manifattura leggera, e la partnership con BMW funge da banco di prova per la validazione in scenari operativi ad alta complessità.
L’integrazione di Figure 02 in contesto industriale
L’integrazione di Figure 02 nello stabilimento di Spartanburg è avvenuta in modo incrementale, all’interno delle linee di montaggio finali, in attività di manipolazione e posizionamento di pannelli metallici. Il robot è stato inserito senza alterare l’infrastruttura preesistente, interagendo direttamente con i flussi produttivi e gli operatori umani. I test hanno riguardato operazioni delicate, come il prelievo di componenti sagomati da un supporto meccanico, il loro trasporto a distanza di pochi metri, e l’inserimento millimetrico in una fixture automatica, operazioni che richiedono forza controllata, coordinazione bimanuale e risposta sensoriale in tempo reale.
Durante le prove, il robot ha dimostrato un comportamento fluido, reattivo e collaborativo. I tecnici BMW hanno monitorato la precisione degli spostamenti, la qualità della presa, il tempo ciclo e l’interazione con il personale di linea. I dati raccolti sono stati utilizzati per migliorare l’integrazione software, ottimizzare i parametri di movimento e testare la sicurezza operativa. BMW ha sottolineato che, pur non essendoci ancora un piano per la distribuzione su larga scala, l’esperimento ha fornito insight preziosi per una futura implementazione standardizzata dei robot umanoidi nel contesto della produzione automotive.
Applicazioni operative e vantaggi competitivi
Figure 02 è concepito per operare in ambienti variabili, con minima preparazione e adattamento. A differenza dei robot industriali convenzionali, che necessitano di celle dedicate, recinzioni di sicurezza e routine di programmazione specifica, questo robot è in grado di riconfigurarsi dinamicamente grazie all’apprendimento per dimostrazione (Learning from Demonstration – LfD) e alla comprensione semantica dei task. Questo permette un cambio di mansione rapido, riducendo sensibilmente i tempi di re-engineering delle linee in caso di cambio modello, aggiornamento del prodotto o variazioni nella forza lavoro.
In ambito produttivo, i benefici attesi includono: riduzione dei carichi ripetitivi sugli operatori, maggiore flessibilità della linea, diminuzione degli errori umani, ottimizzazione dei tempi ciclo e riduzione dell’esposizione a compiti pericolosi o non ergonomici. Inoltre, il robot può essere attivato su richiesta per coprire carenze di manodopera temporanee o gestire picchi produttivi non pianificati, rendendolo uno strumento strategico per la resilienza industriale.
Dal punto di vista competitivo, BMW potrà sfruttare questi strumenti per rafforzare la propria posizione nel settore automotive premium, migliorando ulteriormente qualità, efficienza e sostenibilità. Tuttavia, l’adozione su scala richiederà l’adeguamento di normative interne, sistemi di validazione tecnica, formazione del personale e ridefinizione dei flussi uomo-macchina. Il successo della sperimentazione con Figure 02 rappresenta un passo fondamentale verso la futura coesistenza produttiva tra operai umani e intelligenza artificiale incarnata.
Espansione verso Nuovi Settori Industriali
Figure AI ha espresso ufficialmente l’intenzione di estendere l’uso di Figure 02, oltre il comparto automotive, anche ai settori della logistica e della gestione magazzini. Secondo quanto dichiarato da Figure, la piattaforma è stata pensata sin dal suo concepimento come un sistema general purpose, in grado di operare in contesti dinamici e complessi come quelli tipici delle strutture distributive
Le mani antropomorfe, con 16 gradi di libertà, e la sua camminata bipedale lo rendono capace di compiti con elevata precisione, inclusi il picking, sorting e posizionamento di pacchi in scenari in rapido cambiamento .
Figure AI ha inoltre affermato che Figure 02 può interfacciarsi con scaffalature, pallet e sistemi esistenti, grazie a una struttura modulare che rende il robot compatibile con impianti già in uso . La sua piattaforma AI multimodale integra modelli visivi, linguistici e motorici, permettendo non solo una riconfigurazione rapida tramite comando vocale, ma anche una reazione contestuale a imprevisti, un vantaggio decisivo rispetto ai robot tradizionali che richiedono interventi manuali dell’operatore.
L’azienda prevede che la logistica potrà beneficiare di un robot in grado non solo di sollevare carichi fino a 20 kg e lavorare per 5 ore consecutive, ma anche di interagire in ambienti condivisi con sistemi automatizzati, operando con efficienza e flessibilità senza richiedere ristrutturazioni complesse o sistemi di sicurezza dedicati .

Adatta la presa in base alla forma del pacco, orienta correttamente le etichette per la scansione e riesce a trattare ogni oggetto in circa 4 secondi. Grazie a sensori di forza e memoria visiva, apprende comportamenti raffinati come appiattire le buste per facilitare la lettura dei codici a barre.
Da Figure 01 a Figure 02
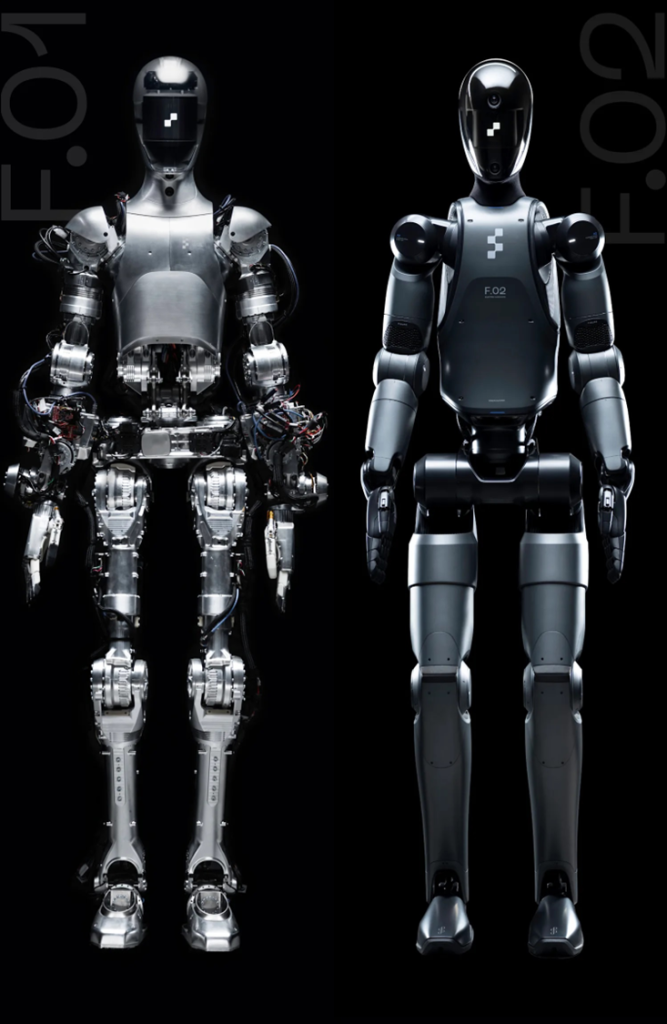
Figure 01 ha visto la luce nel 2023 come primo prototipo funzionale di robot umanoide sviluppato da Figure AI. Era un sistema concettuale destinato a validare l’integrazione tra meccanica bipedale, manipolazione antropomorfa e intelligenza artificiale. Il suo successore, Figure 02, è stato presentato ufficialmente nel 2024 e rappresenta un’evoluzione radicale, pensata per impieghi concreti in ambito industriale, in particolare nel settore manifatturiero e logistico. I due modelli condividono una visione comune — quella di un robot general purpose con capacità cognitive e fisiche avanzate — ma differiscono sostanzialmente in termini di struttura, potenza, precisione e autonomia.
Differenze hardware
La differenza più immediata tra Figure 01 e Figure 02 è nel telaio e nei materiali utilizzati. Mentre Figure 01 era costruito con una combinazione di alluminio standard e materiali compositi, raggiungendo un peso di circa 75 kg, Figure 02 impiega una struttura realizzata in lega di alluminio aeronautico della serie 7000, integrata con componenti in fibra di carbonio ad alte prestazioni. Questa scelta ha permesso di alleggerire il robot a circa 60–65 kg, migliorando il rapporto peso/potenza e abbassando il baricentro, con notevoli vantaggi in termini di stabilità dinamica e consumi energetici.
Anche dal punto di vista degli attuatori la differenza è sostanziale. Figure 01 utilizzava motori elettrici brushless con una coppia nominale di circa 35 Nm e tempi di risposta superiori ai 15 millisecondi. Figure 02 introduce una nuova generazione di motori brushless ad alta densità di potenza, capaci di erogare coppie fino a 50 Nm con tempi di reazione inferiori ai 10 millisecondi. Questa maggiore reattività si traduce in movimenti più fluidi, precisi e sicuri, anche sotto carico.
La sensoristica è stata completamente ripensata: il sistema base di Figure 01 si affidava a telecamere stereo RGB e sensori IMU a 6 assi. Figure 02 adotta invece sei telecamere RGB-D ad alta definizione (1920×1080 pixel) per la percezione tridimensionale, supportate da una suite di sensori inerziali a 9 assi (accelerometro, giroscopio e magnetometro), capaci di offrire un’elevata precisione nella navigazione e nel bilanciamento, anche su superfici non uniformi. Questa sensoristica avanzata consente al robot di riconoscere oggetti in movimento, adattare la presa in tempo reale e reagire in modo affidabile a stimoli ambientali dinamici.
Differenze software
Notevoli anche le differenze nella piattaforma di calcolo. Figure 01 era dotato di una singola unità centrale con CPU quad-core e GPU integrata di fascia media. Figure 02, invece, monta una piattaforma eterogenea costituita da CPU multicore ad alte prestazioni, una GPU dedicata per l’elaborazione delle immagini e un modulo FPGA per il controllo in tempo reale degli attuatori. Questa architettura consente una gestione simultanea dei flussi visivi, della pianificazione motoria e dei sistemi di sicurezza, con una latenza computazionale inferiore a 5 millisecondi.
Anche l’energia e l’autonomia operativa segnano un netto miglioramento. Figure 02 integra una batteria da 2,25 kWh nel torace, con una distribuzione del peso pensata per il bilanciamento, che consente un’autonomia fino a 5 ore con cicli di lavoro completi. In confronto, Figure 01 aveva un’autonomia più limitata e un layout energetico meno ottimizzato per l’equilibrio.
Infine, il software rappresenta un vero salto generazionale. Figure 01 era basato su modelli di controllo preprogrammati e machine learning convenzionale. Figure 02, invece, impiega una suite di algoritmi di deep learning e reinforcement learning continuo, con capacità di autoapprendimento e adattamento in tempo reale. Il robot è inoltre dotato di un sistema avanzato di interazione multimodale, che combina visione artificiale, linguaggio naturale e pianificazione motoria. Ciò consente a Figure 02 di comprendere istruzioni vocali complesse, adattarsi a situazioni non previste e collaborare in modo più efficace con operatori umani.
In sintesi, la transizione da Figure 01 a Figure 02 non è un semplice aggiornamento incrementale, ma un’evoluzione sistemica che coinvolge ogni componente: dalla struttura meccanica agli attuatori, dalla sensoristica all’intelligenza artificiale. Figure 02 rappresenta il primo passo concreto verso un robot umanoide realmente operativo in ambienti industriali reali.






