
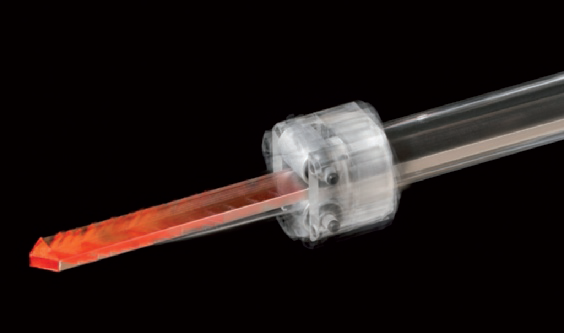
 Un sistema che trasforma la torsione in un movimento longitudinale o in una forza propulsiva. È la torsional gun ideata da un team di ricercatori dell’Università di Trento. Il progetto potrebbe aprire nuove e importanti possibilità nel campo della soft robotics e della robotica bioispirata. Alla base l’idea di superare il concetto di meccanismo composto da parti rigide per arrivare alla progettazione di macchine basate sul movimento di elementi deformabili e caratterizzati da movimenti fl uidi come i tentacoli di un polipo. Questi movimenti seguono rigorosi modelli teorici basati sulla meccanica dei solidi e delle strutture. Il team ha studiato per la prima volta il modo di convertire un movimento torsionale in un movimento longitudinale. Per dimostrare questo effetto i ricercatori hanno costruito il prototipo chiamato torsional gun in cui una freccia viene lanciata con un movimento torsionale delle mani, senza alcun movimento della spalla e del gomito. L’applicazione più immediata è nel campo dell’attuazione meccanica. Il team sta progettando un attuatore meccanico innovativo in cui non sono presenti ingranaggi: molto leggero e adatto ad applicazioni in ambienti estremi, con grandi potenzialità tecnologiche in ambito industriale e aeronautico.
Un sistema che trasforma la torsione in un movimento longitudinale o in una forza propulsiva. È la torsional gun ideata da un team di ricercatori dell’Università di Trento. Il progetto potrebbe aprire nuove e importanti possibilità nel campo della soft robotics e della robotica bioispirata. Alla base l’idea di superare il concetto di meccanismo composto da parti rigide per arrivare alla progettazione di macchine basate sul movimento di elementi deformabili e caratterizzati da movimenti fl uidi come i tentacoli di un polipo. Questi movimenti seguono rigorosi modelli teorici basati sulla meccanica dei solidi e delle strutture. Il team ha studiato per la prima volta il modo di convertire un movimento torsionale in un movimento longitudinale. Per dimostrare questo effetto i ricercatori hanno costruito il prototipo chiamato torsional gun in cui una freccia viene lanciata con un movimento torsionale delle mani, senza alcun movimento della spalla e del gomito. L’applicazione più immediata è nel campo dell’attuazione meccanica. Il team sta progettando un attuatore meccanico innovativo in cui non sono presenti ingranaggi: molto leggero e adatto ad applicazioni in ambienti estremi, con grandi potenzialità tecnologiche in ambito industriale e aeronautico.





UNI EN 1090: il punto di contatto tra progettazione ed esecuzione
Molte non conformità nascono da informazioni incomplete o ambigue negli elaborati progettuali. nella seconda parte dell’approfondimento inaugurato un mese fa ci concentriamo su un’analisi delle responsabilità tecniche che collegano progettista, officina e coordinatore di saldatura. Una quota rilevante delle non

contenuto sponsorizzatoTechne Srl | Maschere di fissaggio: il brevetto che rivoluziona il mondo della metrologia
TECHNE Srl, azienda specializzata in tarature, misure 3D e testing, presenta una soluzione innovativa che rende le maschere di fissaggio più leggere, maneggevoli e precise. TECHNE Srl, azienda di Brescia specializzata in servizi integrati di metrologia, deposita il brevetto di

contenuto sponsorizzatoPrima guida a rulli senza lubrificazione: drylin C per regolazioni fluide
Tre rulli in plastica ad alte prestazioni riducono le forze di azionamento e di spostamento con carichi fino a 20 kg per carrello. Laddove serve spostare manualmente porte o altri elementi mobili, è fondamentale che lo sforzo richiesto sia minimo

contenuto sponsorizzatoMetal Work | Componenti di sicurezza, asset fondamentali nella progettazione delle macchine per l’automazione industriale
La sicurezza nei luoghi di lavoro oggi è un elemento imprescindibile. Per questo Metal Work ha progettato diversi componenti di sicurezza, adatti a supportare il costruttore di macchine nel rispetto dei requisiti normativi e nell’integrazione efficace delle funzioni safety all’interno