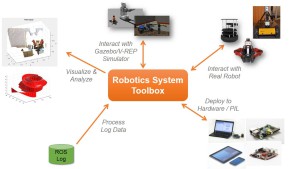
 Robotics System Toolbox è un prodotto all’interno della Release 2015a. Grazie agli algoritmi pronti all’uso e alla connettività hardware per lo sviluppo di applicazioni di robotica mobile e autonoma, Robotics System Toolbox offre un’interfaccia e un’integrazione completa tra MATLAB e Simulink, e il Robot Operating System (ROS). Ora i ricercatori e gli ingegneri nel campo della robotica possono lavorare in un ambiente di progettazione unico e integrato per progettare, testare e distribuire algoritmi di robotica su robot compatibili con ROS e simulatori robot come Gazebo e V-REP. Ciò consente di avere più tempo per le esplorazioni e iterazioni durante la progettazione, riducendo l’intervento manuale per la conversione da MATLAB a ROS. Gli algoritmi forniti da Robotics System Toolbox includono la rappresentazione della mappa, la pianificazione del percorso e il controllo del percorso per robot con drive differenziale. Gli ingegneri possono ora progettare e prototipare applicazioni per il controllo motore, la visione artificiale, e macchine a stati in MATLAB o Simulink, e li possono integrare con algoritmi di base in Robotics System Toolbox. Gli ingegneri possono inoltre generare un nodo ROS da un modello Simulink e distribuirlo a una rete ROS attraverso il supporto per la generazione automatica di codice C++.
Robotics System Toolbox è un prodotto all’interno della Release 2015a. Grazie agli algoritmi pronti all’uso e alla connettività hardware per lo sviluppo di applicazioni di robotica mobile e autonoma, Robotics System Toolbox offre un’interfaccia e un’integrazione completa tra MATLAB e Simulink, e il Robot Operating System (ROS). Ora i ricercatori e gli ingegneri nel campo della robotica possono lavorare in un ambiente di progettazione unico e integrato per progettare, testare e distribuire algoritmi di robotica su robot compatibili con ROS e simulatori robot come Gazebo e V-REP. Ciò consente di avere più tempo per le esplorazioni e iterazioni durante la progettazione, riducendo l’intervento manuale per la conversione da MATLAB a ROS. Gli algoritmi forniti da Robotics System Toolbox includono la rappresentazione della mappa, la pianificazione del percorso e il controllo del percorso per robot con drive differenziale. Gli ingegneri possono ora progettare e prototipare applicazioni per il controllo motore, la visione artificiale, e macchine a stati in MATLAB o Simulink, e li possono integrare con algoritmi di base in Robotics System Toolbox. Gli ingegneri possono inoltre generare un nodo ROS da un modello Simulink e distribuirlo a una rete ROS attraverso il supporto per la generazione automatica di codice C++.