Nonostante si tenda, oggi, a modellare sempre più strutture con elementi solidi, in quanto i più intuitivi e che meglio si adattano ad essere ricavati a partire da modelli solidi generati per altre finalità, non sempre questa risulta la soluzione migliore. Nel caso di strutture sottili, ad esempio, è meglio considerare l’impiego di elementi a guscio, o, più comunemente, shell. Vediamo i loro aspetti peculiari e alcuni spunti per un loro corretto utilizzo in situazioni applicative
di Gianni Cornalba
Non è raro imbattersi in elementi strutturali in cui una dimensione, lo spessore, è molto inferiore delle altre che ne definiscono la geometria. Tali elementi non possono essere assimilati a travi, (strutture monodimensionali), in cui la lunghezza è preponderante rispetto alle dimensioni che definiscono la sezione; allo stesso tempo la loro schematizzazione in elementi solidi non è immediata e consigliabile, sia per i tempi di modellazione sia per quanto riguarda le limitazioni proprie dei modelli solidi.
E’ infatti noto che la corretta modellazione di uno stato di sforzo non uniforme, in particolare se in presenza di elevati gradienti nello spessore, richiede di considerare l’impiego di diversi elementi nello spessore, pena la non corretta determinazione del campo di sforzi e una sottostima delle sollecitazioni massime: se si tiene presente l’esiguità dello spessore degli elementi sottili, ciò implica l’avere elementi con almeno una dimensione molto modesta.
Allo stesso tempo se si vuole evitare di avere elementi con elevate distorsioni lineari e troppo ampi rapporti dimensionali (i cosiddetti elementi a “fiammifero”), che introducono errori numerici anche importanti.
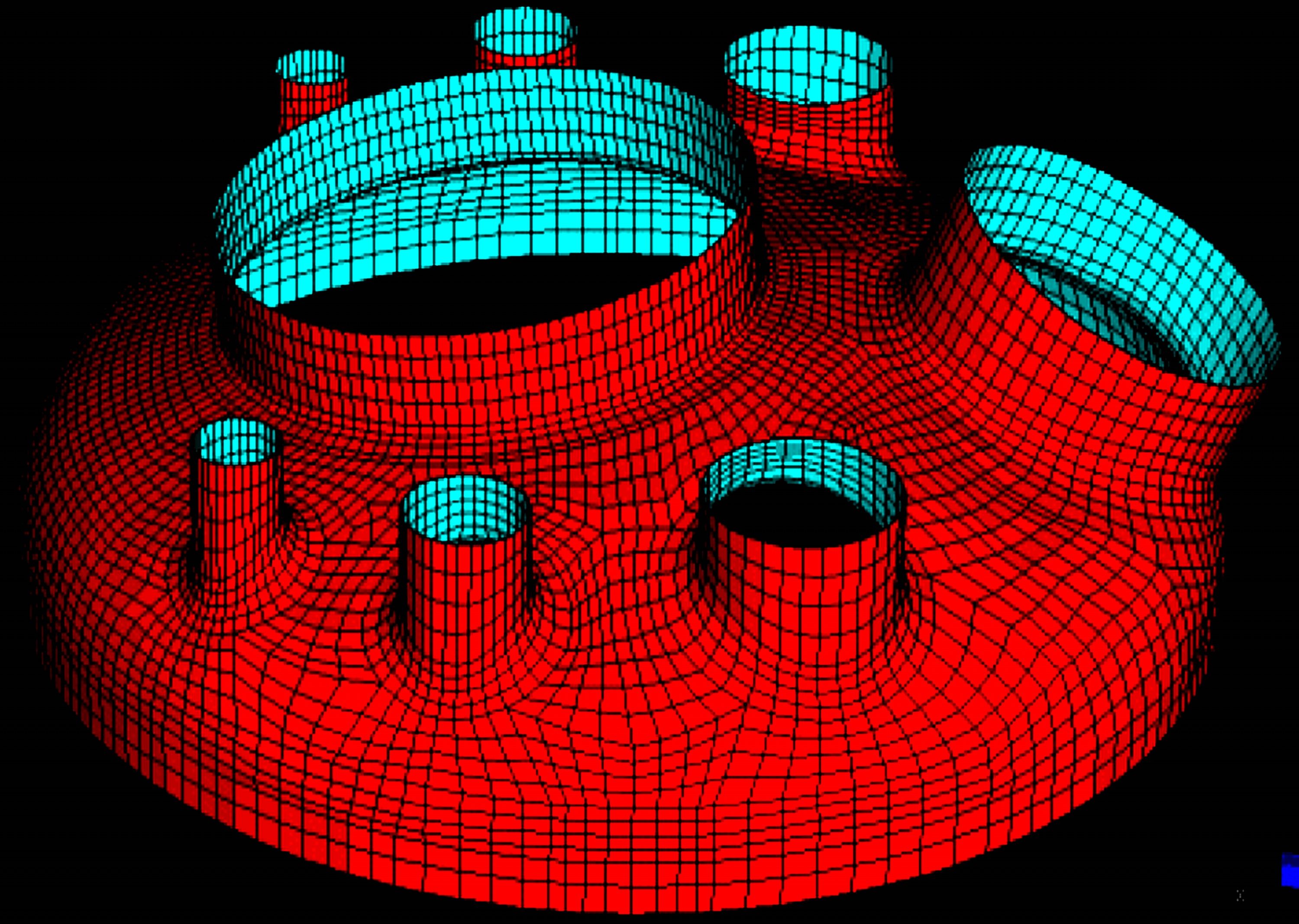
Un esempio di elementi di questo tipo sono i recipienti in pressione di piccolo spessore, che, nel caso di fondi curvi o geometrie complesse, possono da luogo a situazioni in cui la loro verifica richiede l’utilizzo degli elementi finiti. Un altro esempio di questo tipo sono le parti in lamiera. In generale si definiscono di piccolo spessore le strutture in cui il rapporto tra lo spessore e le altre dimensioni che definiscono la geometria della struttura è inferiore a 1/10.
In questi frangenti, la modellazione a elementi finiti è sviluppata utilizzando gli elementi a guscio, più comunemente detti “shell”, i quali riducono lo sviluppo della struttura alla sua superficie media. Le proprietà inerziali dell’elemento di interesse vengono assegnate con definendo il valore dello spessore degli elementi che formano il modello FEM.
La schematizzazione della parte è completata assegnando, come sempre, le proprietà del materiale.
Alcuni tipi di elementi shell
Esistono diversi tipi di elementi shell (vedi Figura 1), con geometria che può essere triangolare e quadrangolare. I primi presentano, a pari ordine, funzioni di forma meno ricche e, quindi, daranno luogo a risultati meno precisi, a pari numero di elementi. Tuttavia, saranno più idonei ad un corretta modellazione di zona con geometria complessa, dove l’impiego di elementi a quattro lati potrebbe indurre problemi di distorsione di alcuni elementi posti in zone critiche, con il problema di una minore accuratezza del risultati.Per quanto riguarda le funzioni di forma, possono essere lineari o paraboliche: nel caso di elementi lineari i nodi sono posti ai soli vertici dell’elemento, mentre quelli con funzioni di forma paraboliche hanno nodi anche nei punti medi dei lati.
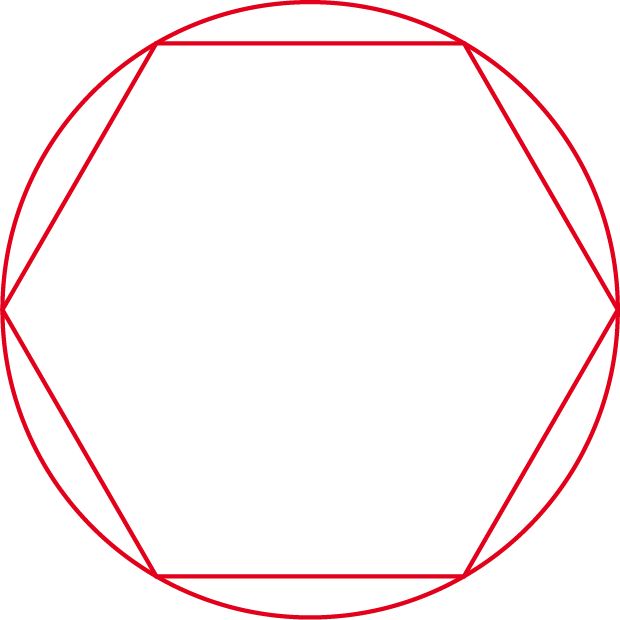
Un aspetto che distingue gli elementi triangolari del prim’ordine è che questi schematizzano il comportamento della struttura come troppo rigido: meglio evitarli, di conseguenza, quando sono attesi elevati gradienti di sforzi e deformazioni.Gli elementi del second’ordine, invece sono in grado di meglio modellare la geometria di elementi con superfici curve, in quanto in grado di descrivere più fedelmente la reale configurazione geometrica del pezzo (Figura 3). In sintesi, per l’analisi di strutture curve, quindi, meglio usare elementi del secondo ordine, che forniscono una più fedele modellazione geometrica e una maggiore accuratezza dei risultati.
Una particolare tipologia di elementi shell è costituita dai cosiddetti “thick shell”, utilizzati per la di strutture con rapporti tra spessore e le altre dimensioni minori di 10:1. La principale differenza rispetto agli elementi shell sottili è che essi considerano la deformabilità al taglio delle strutture: più esplicitamente, mentre nella formulazione classica (alla Kirchhoff) superfici piane perpendicolari alla superficie media in condizione indeformata restano normali a tale superficie una volta che questa si è deformata dopo l’applicazione del sistema dei carichi, nella formulazione “thick shell” (alla Mindlin), le superfici piane perpendicolari alla superficie media restano piane ma non perpendicolari a quest’ultima.Le shell e l’utilizzo in modelli promiscui
Gli elementi shell ben si adattano a modelli in cui coesistono differenti tipologie di elementi: shell, beam e anche solidi. In questi casi bisogna fare attenzione ai diversi gradi di libertà che presentano i solidi rispetto alle shell. I primi, considerano i tre spostamenti nello spazio, i secondi, riducendo una geometria 3D a una superficie considerano anche le tre rotazioni. Per evitare errori e labilità è bene interfacciare shell e solidi con condizioni di vincolo cinematico in grado di trasferire le rotazioni delle shell ai nodi degli elementi solidi e di tradurle, per questi ultimi, in spostamenti nodali. Tali vincoli sono, in genere, chiamati Multi Point Contraints (MPC)
L’interpretazione dei risultati
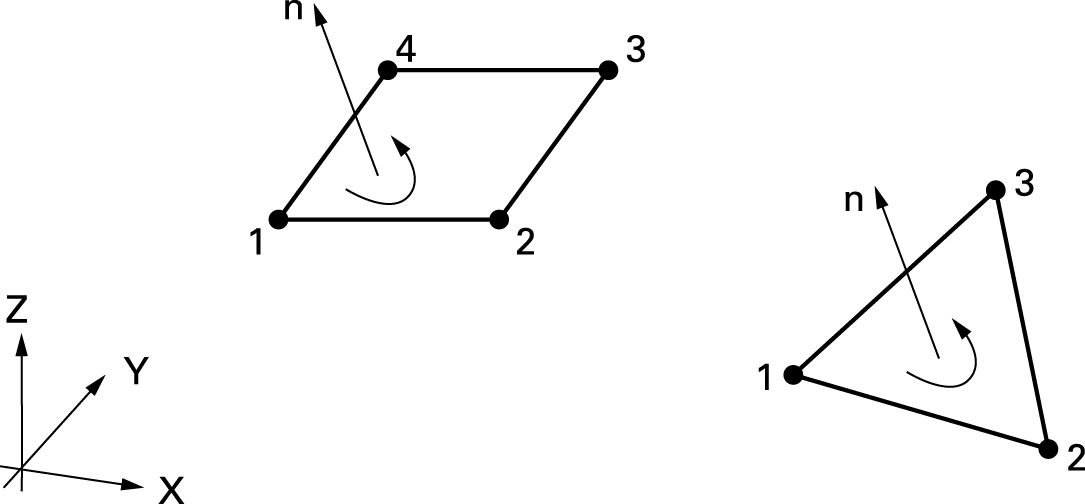
La corretta interpretazione dei risultati di un’analisi a shell richiede che sia chiaro l’orientamento degli elementi, il che significa che la direzione e il verso della normale uscente dell’elemento deve essere definita in maniera consapevole e coerente nelle diverse parti di un modello. Infatti, nel caso in cui la shell venga caricata con una pressione questa verrà assunta come positiva nel caso in cui concorde con la normale uscente. Quest’ultima è definita dal programma di modellazione in funzione dell’ordine di numerazione dei nodi (vedi Figura 2). Per evitare definizioni discordi (e quindi pressioni con verso errato) è bene verificare la concordanza e l’esattezza della normale nelle varie zone del modello e, se il caso, cambiare l’impostazione originale.Per quanto riguarda l’analisi dei risultati, il risultato primario di un calcolo a shell saranno, dopo gli spostamenti, il calcolo delle azioni interne negli elementi. Da queste sarà ricavata la distribuzione degli sforzi, che sarà lineare lungo lo spessore. In altre parole l’andamento degli sforzi nello spessore avrà una componente costante (membranale) ed una variabile linearmente (flessionale), in base alle quali sarà possibile fare le considerazioni di resistenza della struttura per le quali il calcolo è stato eseguito.
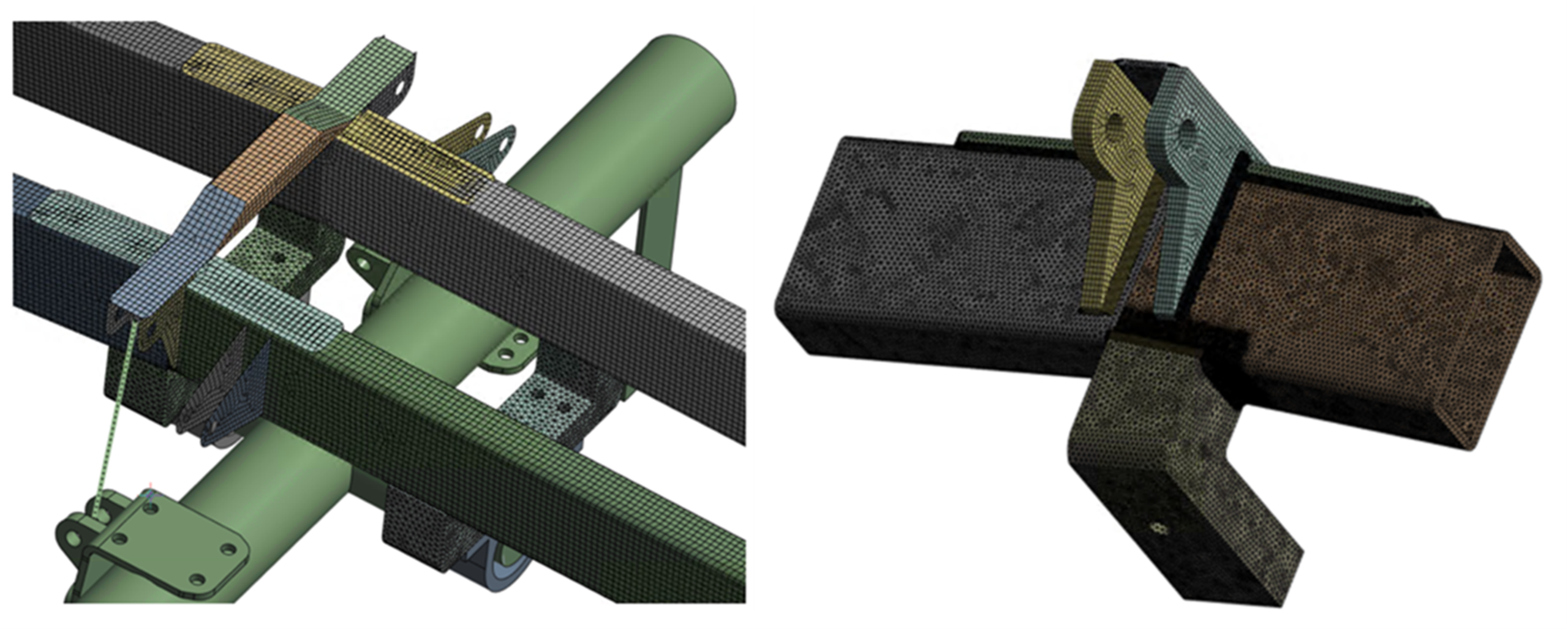
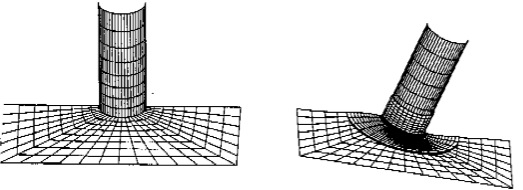
Questo comporta il fatto che con i modelli a shell non siamo in grado di determinare gli sforzi locali o di picco, quelli legati alla effettiva geometria del dettaglio (raggi di raccordo, gole..), la cui conoscenza è necessaria in alcune condizioni di utilizzo (la fatica, ad esempio). In queste situazioni si può prevedere di fare seguire all’analisi a shell una seconda simulazione con elementi solidi del solo particolare di interesse sfruttando la tecnica del sub-modelling (Figura 4), nella quale a un’analisi a shell globale si fa seguire un’analisi con elementi solidi del dettaglio di interesse, imponendo al contorno di questo gli spostamenti ricavati nella precedente analisi.