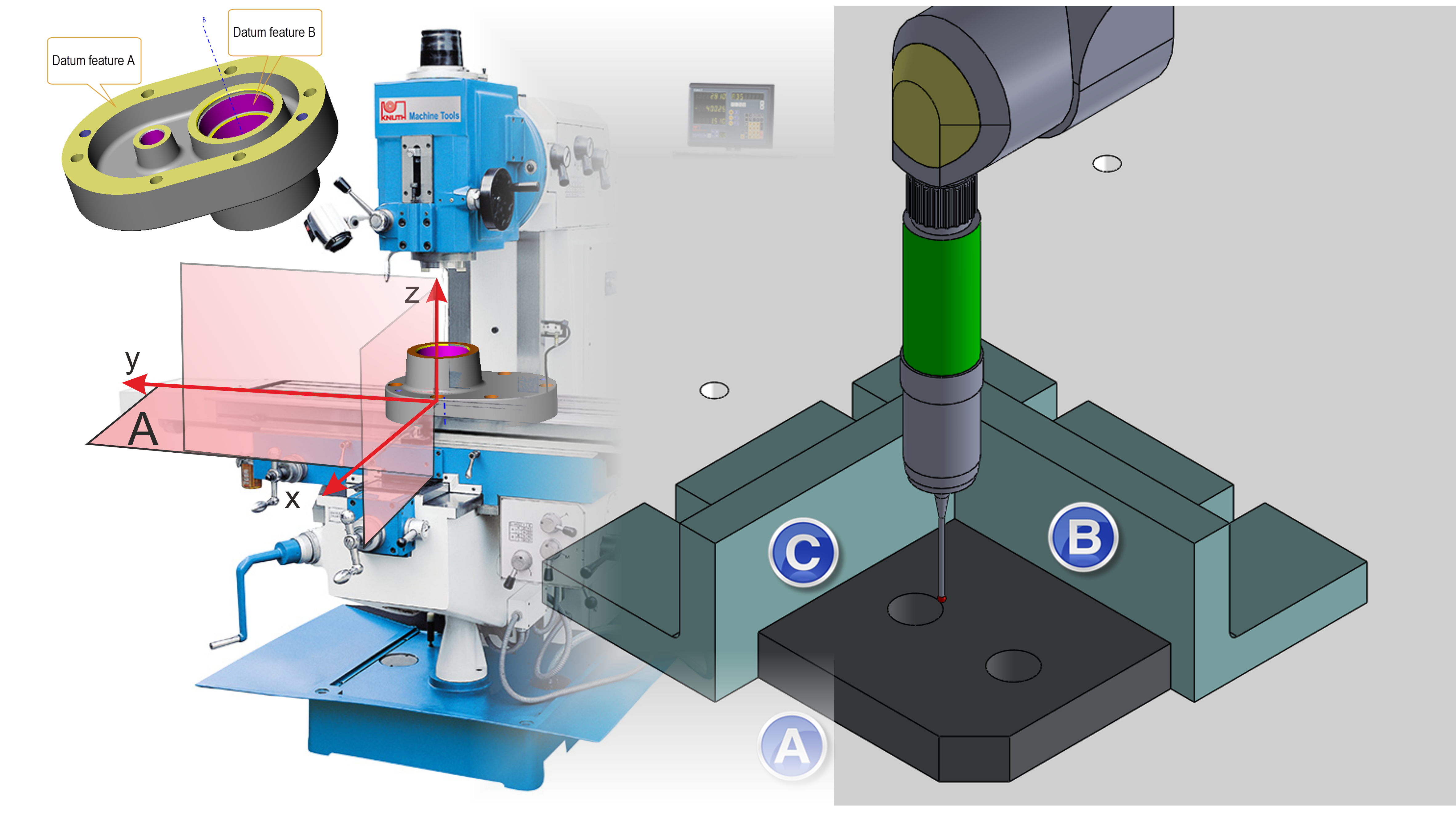
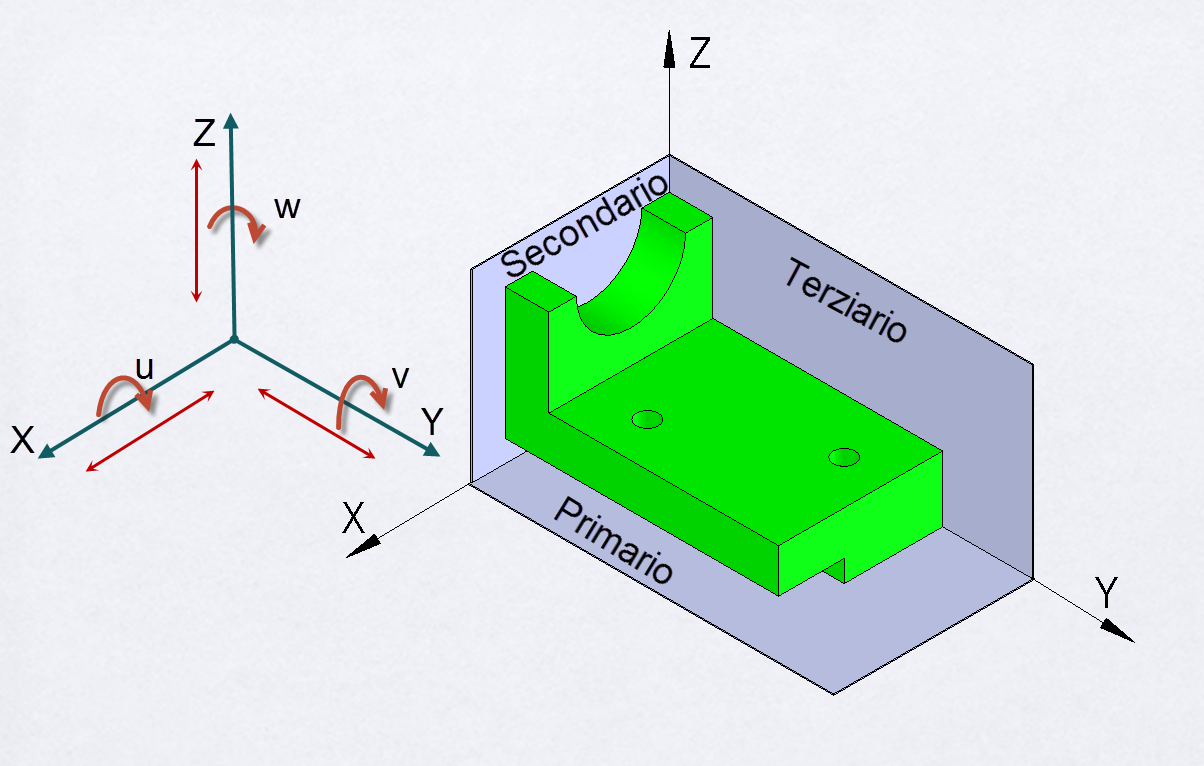
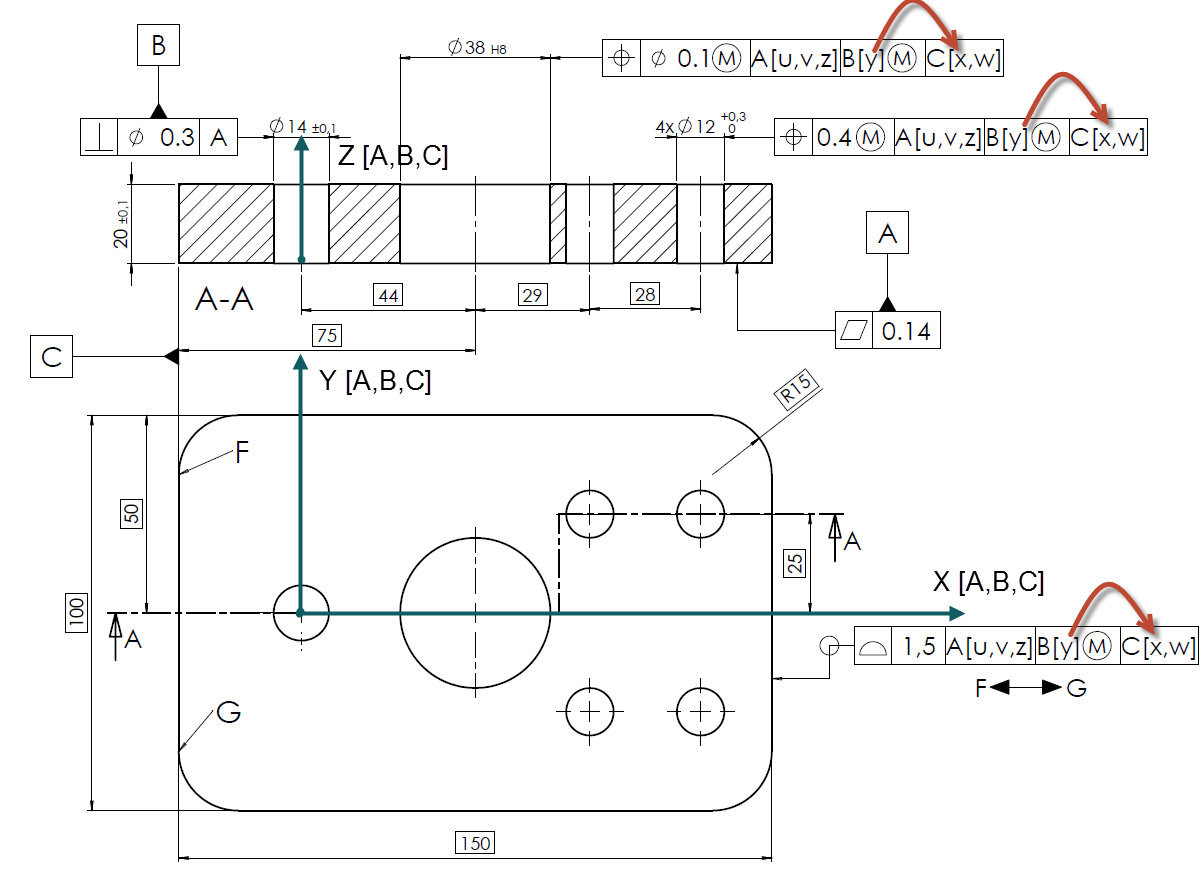
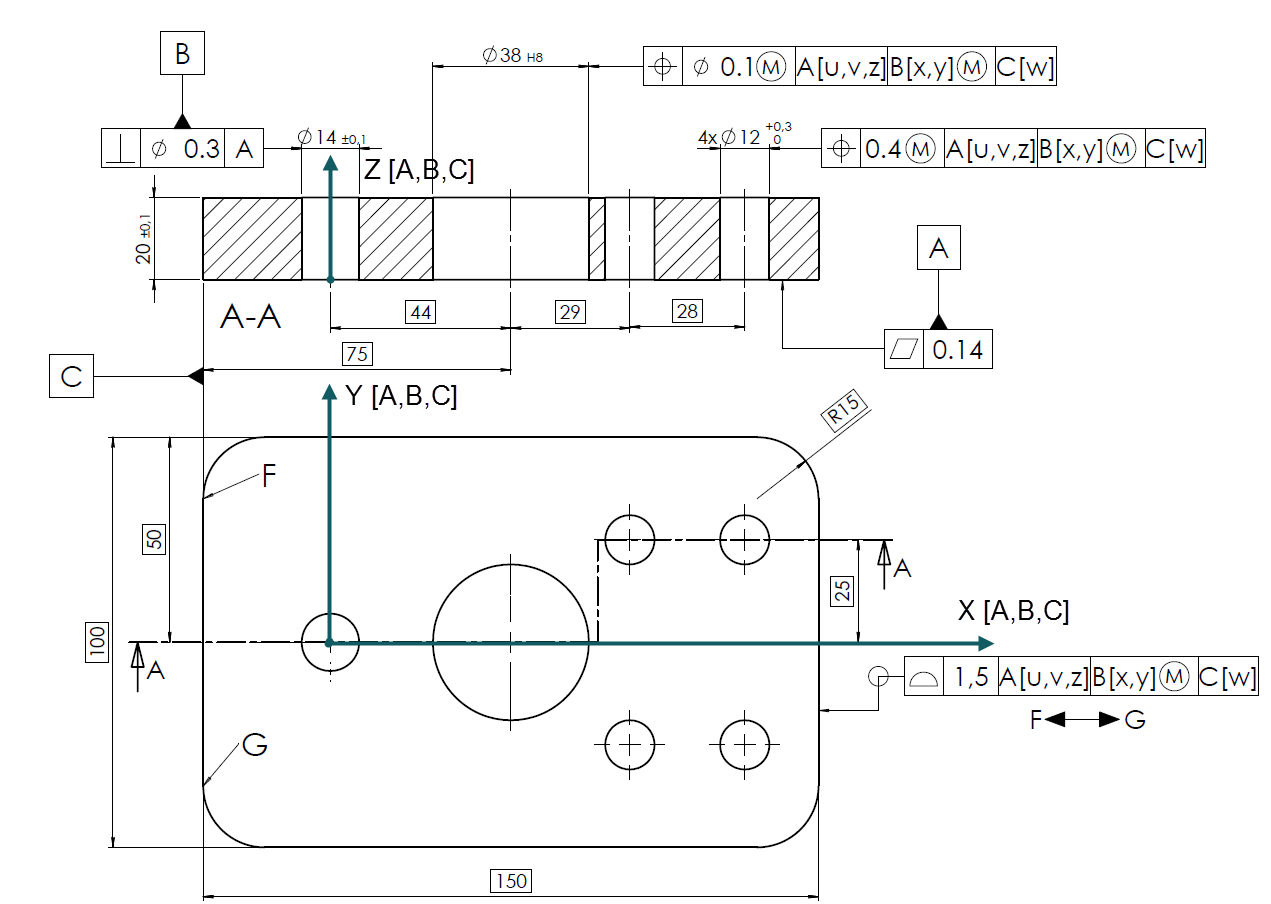
Il riferimento (o datum) è un elemento geometrico astratto, di forma perfetta, assunto come origine per stabilire dimensioni e localizzazione delle singolarità geometriche di un componente. E’ opportuno distinguere tra l’elemento di riferimento reale del pezzo (denominato datum feature) e il datum che rappresenta la controparte perfetta della datum feature (es. un piano ideale), o l’asse della controparte geometrica perfetta. Gli elementi di riferimento sono particolari superfici fisiche di parti reali etichettati e imperfetti, che servono a limitare i gradi di libertà (di rotazione e traslazione) durante i processi di assemblaggio. I riferimenti simulati sono concettualmente perfetti, o fisicamente quasi perfetti, e rappresentano il ponte tra il mondo reale imperfetto dei datum feature e il mondo immaginario perfetto dei Datum (fig. 1). I riferimenti simulati hanno il compito di definire il DRF (Datum Reference Frame), cioè il sistema di riferimento a 3 piani perpendicolari che definisce l’origine per le misure e permette il bloccaggio del pezzo durante il controllo o la lavorazione. Il riferimento primario A elimina tre gradi di libertà (2 rotazionali, u e v e uno lineare Z). Il riferimento secondario elimina 2 gradi di libertà (lineare Y e rotazionale w). Infine il riferimento terziario elimina l’ultimo grado di libertà di traslazione X (fig. 2). Per rendere più chiara l’identificazione del DRF, la nuova norma del 2009 ha introdotto la possibilità di identificare nel disegno gli assi del sistema di riferimento, attraverso l’identificazione dei gradi di libertà di traslazione lungo le direzioni X, Y e Z (fig. 3). La nuova norma ASME Y14.5 del 2009 ha introdotto la possibilità di personalizzare il numero di gradi di libertà eliminati da ogni piano del DRF. Ad esempio nel componente di figura 4, accanto alla definizione dei datum, sono stati indicati tra parentesi quadra i gradi di liberà eliminati: il riferimento primario A elimina tre gradi di libertà u, v e z, il riferimento secondario B (asse del foro da 14 mm) elimina due gradi di libertà traslazionali x e y, ed infine il terzo riferimento C ha il compito di bloccare la rotazione w. In base ad esigenze progettuali, è possibile variare il numero di gradi di libertà eliminati dai Datum: ad esempio nella figura 5, il compito di limitare il grado di libertà lungo la direzione x è passato dal riferimento B al riferimento C. Lasciamo ai lettori il progetto del calibro funzionale per il controllo della piastra nelle due configurazioni proposte.