
I metamateriali meccanici sono strutture artificiali le cui proprietà non dipendono tanto dal materiale, quanto dalla geometria delle celle reticolari che ne compongono l’architettura.
Grazie alla manifattura additiva è oggi possibile progettare e produrre queste strutture, ottenendo proprietà meccaniche programmabili e non presenti nei materiali tradizionali.
Fondamenti dei metamateriali meccanici
Nel panorama contemporaneo della progettazione industriale, il concetto di metamateriale meccanico rappresenta una delle evoluzioni più significative nella concezione delle strutture portanti. A differenza dei materiali tradizionali, le cui proprietà meccaniche dipendono principalmente dalla composizione chimica e dalla microstruttura interna, i metamateriali strutturali devono il loro comportamento macroscopico alla geometria su scala intermedia (“mesoscala”). In altre parole, è la configurazione spaziale del materiale, più che il materiale stesso, a determinare rigidezza, resistenza, capacità di assorbimento energetico e risposta dinamica della struttura.
Un metamateriale meccanico può essere definito come un materiale artificiale la cui risposta elastica o plastica è governata da una struttura periodica o quasi-periodica progettata secondo criteri geometrici specifici. Tale struttura, generalmente organizzata in celle elementari ripetute nello spazio, consente di ottenere proprietà efficaci non direttamente riscontrabili nei materiali costituenti. Si parla, in questo contesto, di proprietà emergenti, ovvero caratteristiche globali che derivano dall’interazione tra forma, connessioni e distribuzione della massa all’interno del volume.
L’introduzione di queste architetture è stata resa possibile dall’evoluzione della manifattura additiva e delle tecniche di modellazione numerica avanzata. Prima della diffusione delle tecnologie di stampa 3D metallica e polimerica, la realizzazione di strutture interne complesse risultava economicamente o tecnologicamente proibitiva. Oggi, invece, è possibile progettare e produrre reticoli tridimensionali con passo millimetrico o sub-millimetrico, integrandoli direttamente all’interno di componenti strutturali destinati ad applicazioni industriali ad alte prestazioni.
Materiali tradizionali e materiali ingegnerizzati
Nella progettazione classica, il progettista seleziona un materiale sulla base delle sue proprietà intrinseche, quali modulo elastico, limite di snervamento, tenacità o densità, e successivamente definisce la geometria del componente in funzione dei carichi applicati. Il comportamento strutturale è dunque il risultato della combinazione tra proprietà del materiale e forma esterna del pezzo.
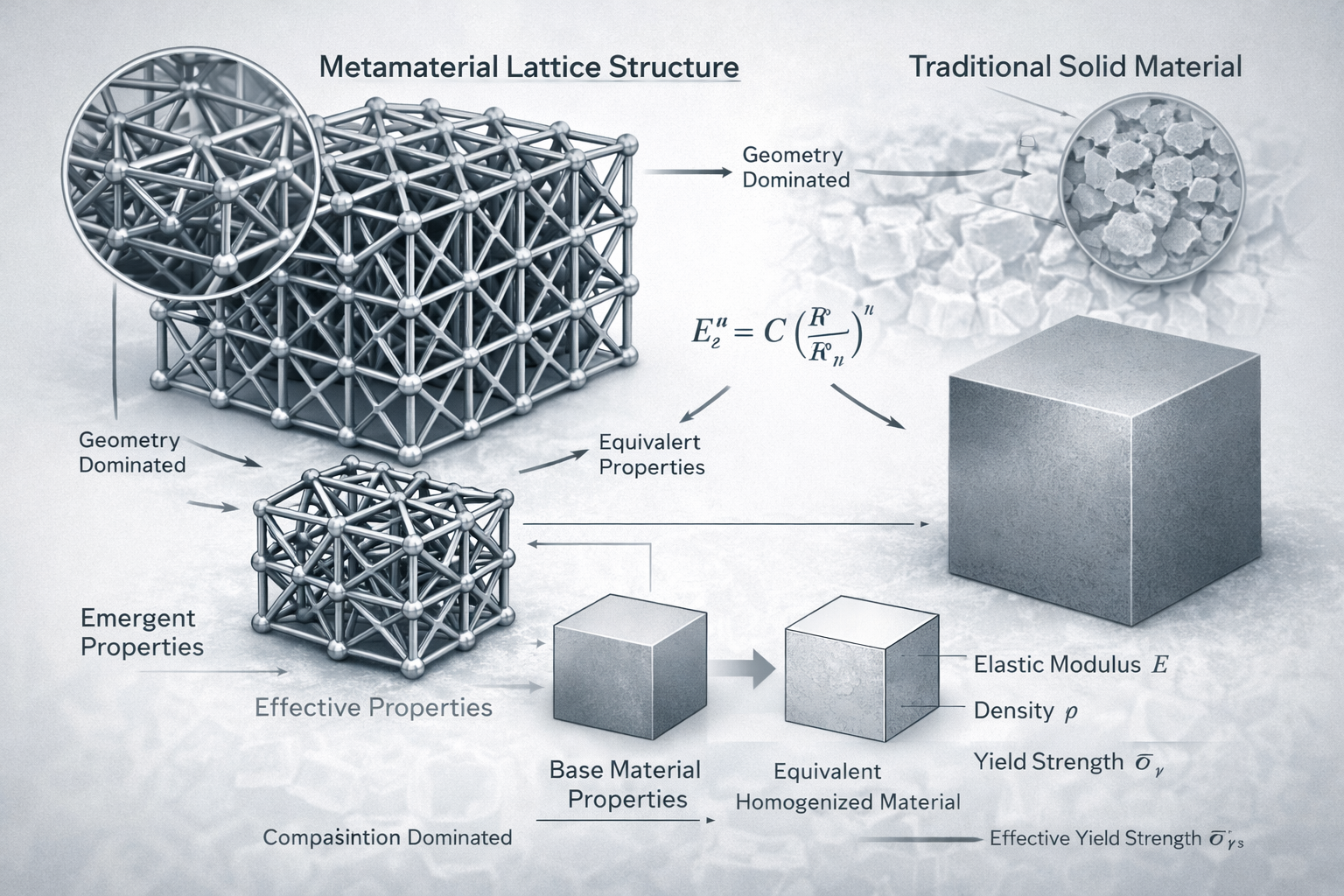
Nel caso dei metamateriali, invece, la distinzione tra materiale e geometria tende a sfumare. La cella elementare, ripetuta nello spazio secondo uno schema definito, diventa essa stessa il “materiale” dal punto di vista strutturale. Le proprietà meccaniche globali possono essere descritte attraverso parametri efficaci, quali modulo elastico equivalente o densità relativa, che dipendono dal rapporto tra volume solido e volume totale occupato dalla struttura reticolare. Ciò consente di progettare materiali con rigidezza specifica elevata, ossia con un rapporto tra modulo elastico e densità superiore a quello dei materiali massivi convenzionali.
Questo approccio introduce una nuova libertà progettuale: non si è più vincolati alle proprietà fornite dalla natura o dai processi metallurgici tradizionali, ma si possono “programmare” le prestazioni meccaniche intervenendo sulla topologia interna. Ad esempio, variando lo spessore delle aste di un reticolo o modificando l’angolo di connessione tra gli elementi, si può ottenere un comportamento più rigido o più deformabile a parità di materiale di base.
Proprietà emergenti e omogeneizzazione
Un aspetto centrale nella progettazione dei metamateriali è il concetto di omogeneizzazione. Sebbene la struttura interna sia discretizzata in celle ed elementi reticolari, a scala macroscopica il componente può essere trattato come un continuo equivalente dotato di proprietà “medie”.
Tale passaggio è fondamentale per integrare i metamateriali nei modelli di calcolo strutturale, permettendo di descriverne il comportamento attraverso parametri efficaci inseriti nei software di simulazione agli elementi finiti.
Le proprietà emergenti possono includere comportamenti non convenzionali, come coefficienti di Poisson negativi (materiali auxetici), elevata capacità di assorbimento energetico per unità di massa o risposta anisotropa controllata. In questi casi, la risposta globale non è immediatamente intuibile osservando il materiale costituente, ma deriva dall’interazione geometrica tra le celle elementari. La progettazione diventa quindi un problema multiscala, in cui la scala della cella e quella del componente devono essere armonizzate per garantire coerenza tra comportamento locale e risposta globale.
Dal punto di vista ingegneristico, l’adozione dei metamateriali implica una revisione dei criteri tradizionali di dimensionamento. Non è più sufficiente verificare tensioni e deformazioni su una sezione piena, ma occorre considerare fenomeni di instabilità locale, collasso progressivo delle celle e interazioni tra elementi reticolari. La comprensione dei fondamenti fisici e geometrici dei metamateriali costituisce pertanto la base indispensabile per sviluppare applicazioni industriali affidabili e ripetibili.
Geometrie reticolari e comportamento meccanico
La definizione della topologia reticolare costituisce il passaggio centrale nella progettazione di un metamateriale. Una volta stabilito il materiale di base e il campo di applicazione, è la geometria della cella elementare a determinare in modo predominante le proprietà strutturali globali. Le celle reticolari possono essere classificate in funzione della loro simmetria spaziale, del numero di nodi per cella, dell’orientazione degli elementi portanti e del meccanismo prevalente di trasferimento degli sforzi.
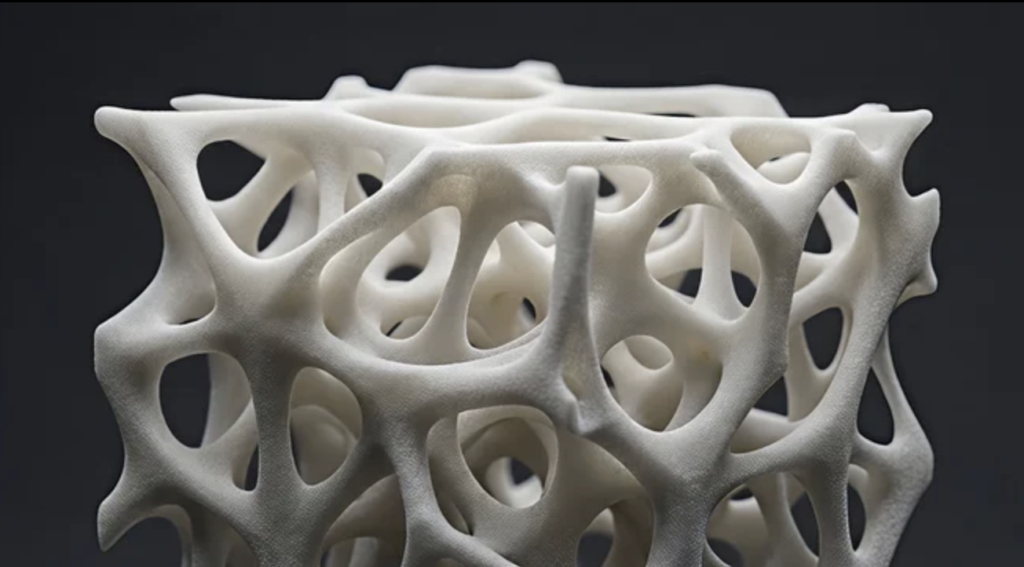
Le configurazioni più diffuse in ambito industriale derivano da reticoli cristallografici semplificati, quali BCC (Body-Centered Cubic), FCC (Face-Centered Cubic) e Octet Truss, oltre a strutture più complesse come quelle basate su superfici minime periodiche tridimensionali (TPMS – Triply Periodic Minimal Surfaces). Ogni topologia presenta un differente equilibrio tra rigidezza, densità relativa e capacità di deformazione, rendendo la scelta geometrica un atto progettuale strategico e non meramente formale.
Densità relativa e proprietà meccaniche equivalenti
Un parametro fondamentale nella descrizione delle strutture reticolari è la densità relativa, definita come il rapporto tra la densità del reticolo e la densità del materiale massivo costituente. Essa può essere espressa come funzione del volume solido effettivamente presente nella cella rispetto al volume totale occupato dalla stessa. Riducendo la densità relativa si ottiene un alleggerimento significativo del componente, ma tale riduzione deve essere bilanciata con il mantenimento di adeguate proprietà meccaniche.
Il modulo elastico equivalente di un reticolo dipende dalla topologia e dalla densità relativa secondo leggi di scala che possono assumere forma lineare o quadratica. In alcune configurazioni, la rigidezza cresce proporzionalmente alla densità relativa; in altre, l’incremento è più lento, evidenziando una maggiore sensibilità alla riduzione di massa. Analogamente, la resistenza a compressione e il comportamento a collasso progressivo risultano fortemente influenzati dalla distribuzione degli elementi strutturali e dall’efficienza con cui essi trasferiscono gli sforzi.
Dal punto di vista progettuale, ciò significa che due reticoli aventi la stessa densità relativa possono esibire proprietà meccaniche molto differenti. La scelta della geometria deve quindi essere guidata da obiettivi prestazionali specifici: massima rigidezza specifica, elevata capacità di assorbimento energetico o comportamento controllato in presenza di carichi dinamici. Nel confronto tra differenti topologie reticolari, la relazione di Gibson–Ashby rappresenta uno strumento fondamentale per stimare il modulo elastico equivalente E* del metamateriale in funzione delle proprietà del materiale massivo di base Es.
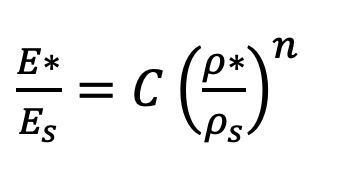
Il rapporto tra le due grandezze è espresso in funzione della densità relativa p*/ps dove p* è la densità del reticolo e ps quella del materiale pieno. Il coefficiente C dipende dalla specifica geometria della cella elementare, mentre l’esponente n riflette il meccanismo prevalente di deformazione: valori prossimi a 1 caratterizzano strutture stretching-dominated, mentre valori intorno a 2 sono tipici di configurazioni bending-dominated. Questa legge di scala consente al progettista di valutare preliminarmente il compromesso tra alleggerimento e perdita di rigidezza.
Meccanismi di deformazione: stretching e bending dominated
Il comportamento meccanico delle strutture reticolari può essere ricondotto a due meccanismi fondamentali di trasferimento degli sforzi: quello dominato da trazione/compressione assiale degli elementi (stretching-dominated) e quello dominato da flessione delle aste (bending-dominated). Questa distinzione è cruciale per comprendere la risposta elastica e la stabilità del reticolo sotto carico.
Nei reticoli stretching-dominated, come l’Octet Truss, gli elementi sono orientati in modo tale che i carichi applicati generino principalmente sforzi assiali. Questo comporta un’elevata efficienza strutturale, poiché il materiale lavora prevalentemente a trazione o compressione, condizioni in cui la capacità portante è massima. Tali strutture presentano una rigidezza specifica superiore e un comportamento più stabile anche a basse densità relative.
Al contrario, nei reticoli bending-dominated, gli elementi sono soggetti prevalentemente a flessione. In queste configurazioni, tipiche di alcune varianti BCC o Kelvin, la rigidezza equivalente risulta più sensibile alla riduzione della sezione delle aste e alla lunghezza libera tra i nodi. Sebbene tali strutture siano meno efficienti in termini di rigidezza specifica, esse possono offrire vantaggi in termini di duttilità e capacità di assorbimento energetico progressivo, risultando adatte ad applicazioni in cui è richiesta una deformazione controllata.
L’analisi di questi meccanismi richiede l’integrazione tra modellazione numerica e validazione sperimentale. Le simulazioni agli elementi finiti consentono di valutare la distribuzione delle tensioni a livello di cella elementare e di prevedere fenomeni di instabilità locale, quali il buckling delle aste sottili. La corretta comprensione del comportamento meccanico delle diverse topologie rappresenta dunque il fondamento per una progettazione consapevole e orientata alle prestazioni.

Progettazione parametrica e ottimizzazione topologica
La crescente diffusione dei metamateriali meccanici nel settore industriale è strettamente legata allo sviluppo di strumenti di progettazione parametrica e di ottimizzazione numerica avanzata. Se la definizione della cella elementare costituisce il punto di partenza concettuale, è attraverso la modellazione assistita da calcolatore che diventa possibile controllare in modo sistematico le proprietà meccaniche globali del componente. La progettazione di strutture reticolari non può infatti essere affidata a scelte intuitive: essa richiede un approccio quantitativo, capace di correlare parametri geometrici, densità relativa e prestazioni strutturali.
La progettazione dei metamateriali implica un problema intrinsecamente multiscala. A scala microscopica si analizza la cella elementare, a scala macroscopica si valuta il comportamento dell’intero componente. La difficoltà principale consiste nel collegare in modo coerente queste due dimensioni. I metodi di omogeneizzazione forniscono uno strumento teorico per determinare le proprietà equivalenti del materiale ingegnerizzato, partendo dall’analisi dettagliata della cella.
Attraverso simulazioni agli elementi finiti applicate alla singola cella, è possibile determinare il modulo elastico equivalente, il coefficiente di Poisson efficace e altri parametri meccanici medi. Tali valori vengono poi impiegati nel modello globale del componente, trattandolo come un continuo equivalente. Questo procedimento consente di ridurre drasticamente il costo computazionale rispetto a una modellazione completa dell’intero reticolo, che risulterebbe spesso proibitiva per componenti di grandi dimensioni.
Nel contesto dell’approccio multiscala, il tensore di rigidezza equivalente Ceff viene determinato imponendo l’equivalenza tra l’energia elastica del continuo omogeneizzato (termine a sinistra) e l’energia effettivamente accumulata nella cella reticolare reale (termine a destra).

Il termine e rappresenta il vettore delle deformazioni macroscopiche imposte, mentre C(x) descrive il comportamento costitutivo locale del materiale nella posizione X all’interno del volume della cella Vcell. Questa formulazione energetica consente di ricavare parametri efficaci, come il modulo elastico equivalente e il coefficiente di Poisson, integrando l’analisi FEM locale nel modello globale del componente.
Nel controllo della risposta dinamica di componenti reticolari, una stima preliminare delle frequenze naturali fn può essere ottenuta considerando il rapporto tra modulo elastico equivalente E* e densità p*:
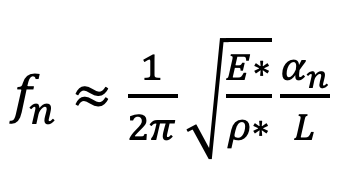
Il parametro L rappresenta una dimensione caratteristica del sistema (ad esempio la lunghezza libera della struttura), mentre an è un coefficiente adimensionale legato al modo di vibrare e alle condizioni di vincolo. La radice quadrata del rapporto E*/p* evidenzia come la frequenza sia governata dalla rigidezza specifica del metamateriale. Tale relazione risulta particolarmente utile nella progettazione di strutture leggere soggette a vincoli modali, come nel caso di bracci robotici o componenti aerospaziali.
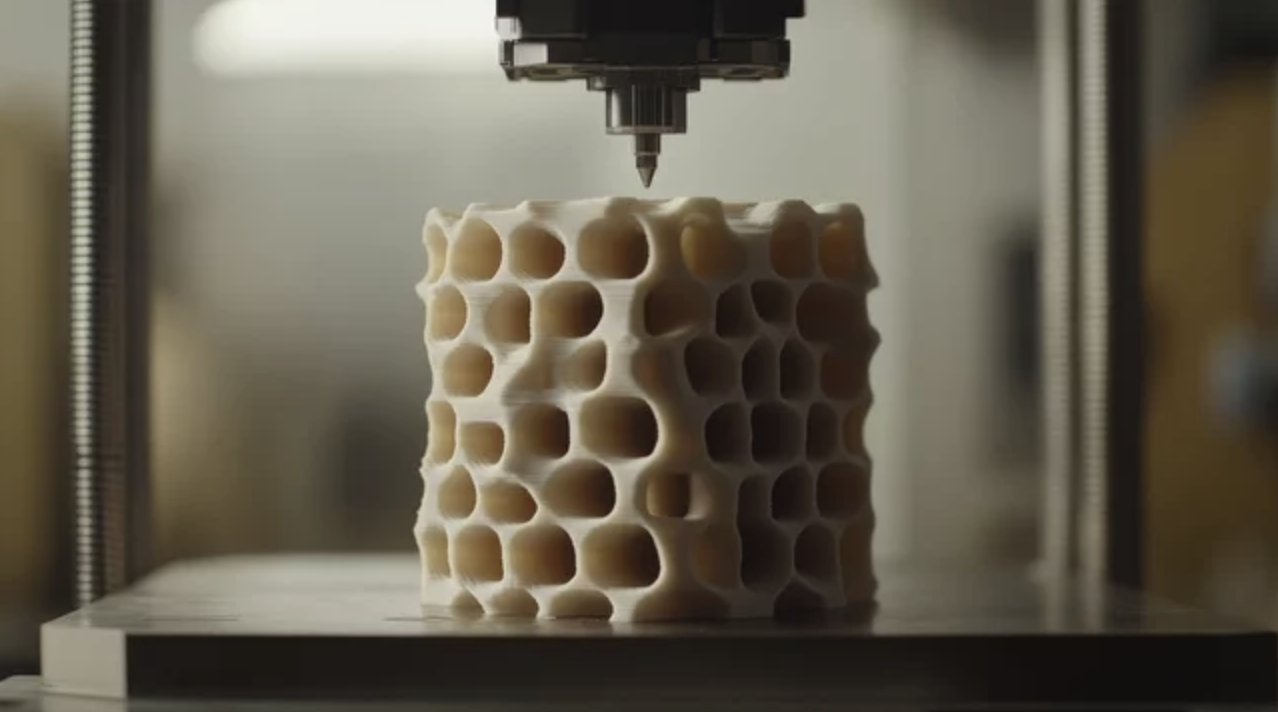
Manifattura additiva e vincoli tecnologici
La concreta applicazione industriale dei metamateriali meccanici è strettamente legata alla maturità delle tecnologie di manifattura additiva. Le strutture reticolari tridimensionali, caratterizzate da geometrie interne complesse e da celle periodiche di dimensioni ridotte, sarebbero difficilmente realizzabili mediante processi sottrattivi o formatura tradizionale. La produzione layer-by-layer, invece, consente di costruire architetture interne con elevato grado di libertà geometrica, integrando reticoli e zone piene all’interno dello stesso componente.
Tra le tecnologie maggiormente impiegate in ambito metallico si annoverano il Laser Powder Bed Fusion (LPBF) e l’Electron Beam Melting (EBM), mentre in ambito polimerico sono diffuse soluzioni come Fused Deposition Modeling (FDM) avanzata, Selective Laser Sintering (SLS) e stereolitografia. Ogni processo presenta specifiche peculiarità in termini di risoluzione, finitura superficiale, anisotropia meccanica e controllo dimensionale. La scelta della tecnologia produttiva non è quindi secondaria rispetto alla progettazione geometrica del reticolo, ma ne condiziona in modo diretto la fattibilità e le prestazioni finali.
Limiti geometrici e tolleranze dimensionali
Uno dei principali vincoli nella produzione di strutture reticolari riguarda il diametro minimo realizzabile delle aste e lo spessore delle pareti interne. Nei processi a letto di polvere, ad esempio, la dimensione dello spot laser, la granulometria della polvere e la gestione termica influenzano la stabilità delle sezioni sottili. Aste troppo esili possono risultare parzialmente fuse, deformate o caratterizzate da irregolarità superficiali significative.
Le tolleranze dimensionali assumono un ruolo critico nei metamateriali, poiché piccole variazioni geometriche possono tradursi in variazioni sensibili delle proprietà meccaniche equivalenti. Una riduzione involontaria del diametro di un elemento reticolare comporta una diminuzione della rigidezza locale e può anticipare fenomeni di instabilità per carico di punta. Per tale motivo, la progettazione deve includere fattori correttivi che tengano conto delle deviazioni tipiche del processo produttivo.
Un ulteriore aspetto riguarda la presenza di polvere intrappolata all’interno delle celle nei processi metallici. In reticoli ad alta densità o con geometrie chiuse, la rimozione del materiale non sinterizzato può risultare complessa, imponendo specifiche strategie di estrazione e orientamento del pezzo in fase di stampa. La geometria deve dunque essere concepita non solo in funzione delle prestazioni strutturali, ma anche in relazione alla post-lavorazione e alla pulizia interna.
La verifica a instabilità locale delle aste che compongono la cella reticolare è essenziale, soprattutto quando la densità relativa è ridotta e gli elementi sono snelli. Il carico critico Pcr secondo la teoria di Eulero dipende dal modulo elastico del materiale E, dal momento d’inerzia della sezione l, dalla lunghezza libera di inflessione L e dal coefficiente di vincolo K, che tiene conto delle condizioni agli estremi dell’asta:
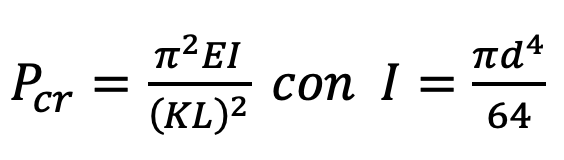
Per sezioni circolari, il momento d’inerzia è funzione del diametro . Questa relazione evidenzia come piccole variazioni del diametro o della lunghezza influenzino in modo quadratico o alla quarta potenza la stabilità dell’elemento, ponendo limiti progettuali stringenti nei processi di stampa additiva.
Anisotropia, difetti e qualità superficiale
La manifattura additiva introduce una marcata anisotropia delle proprietà meccaniche, legata alla direzione di crescita del materiale e ai cicli termici locali. Nei componenti reticolari, questa anisotropia può influenzare la risposta a trazione, compressione e fatica, soprattutto quando le aste sono orientate secondo direzioni sfavorevoli rispetto alla stratificazione. Il progettista deve quindi considerare l’orientamento di stampa come una variabile progettuale, valutando l’allineamento tra direzione principale delle sollecitazioni e direzione di deposizione del materiale.
La qualità superficiale rappresenta un ulteriore fattore determinante. Le superfici delle aste reticolari prodotte per fusione a letto di polvere presentano una rugosità superiore rispetto ai componenti lavorati tradizionalmente. Tale rugosità agisce come concentratore di tensione e può ridurre significativamente la resistenza a fatica, specialmente in strutture bending-dominated dove la sollecitazione flessionale è predominante. Interventi di finitura superficiale risultano spesso impraticabili per reticoli interni complessi, rendendo necessario un compromesso tra densità relativa, diametro delle aste e durabilità a lungo termine.
Applicazioni industriali e prospettive future
L’interesse verso i metamateriali e le strutture reticolari non è più confinato alla ricerca accademica, ma si traduce oggi in applicazioni concrete in diversi settori industriali ad alto contenuto tecnologico. La possibilità di progettare proprietà strutturali “su misura”, intervenendo sulla geometria interna anziché esclusivamente sul materiale di base, rappresenta una leva strategica per l’alleggerimento, l’efficienza energetica e la sicurezza strutturale.
In ambito aerospaziale, le strutture reticolari trovano impiego in componenti secondari e primari soggetti a severi vincoli di massa. Staffe, supporti, pannelli interni e strutture sandwich con anima reticolare consentono di ridurre significativamente il peso mantenendo livelli elevati di rigidezza specifica. In questi contesti, anche una riduzione di massa dell’ordine di pochi punti percentuali può generare benefici rilevanti in termini di consumo di carburante o capacità di carico utile. La progettazione multiscala permette inoltre di integrare zone a densità variabile, adattando la distribuzione del materiale alle mappe di sollecitazione ricavate da analisi FEM globali.
Nel settore automotive, le applicazioni riguardano principalmente elementi di assorbimento d’urto, crash box e componenti strutturali secondari. Le configurazioni bending-dominated, opportunamente calibrate, possono garantire un collasso progressivo controllato, dissipando energia cinetica in modo prevedibile durante un impatto. Ciò consente di migliorare la sicurezza passiva senza penalizzare eccessivamente la massa complessiva del veicolo. Parallelamente, nei veicoli elettrici, la riduzione del peso strutturale contribuisce ad aumentare l’autonomia e l’efficienza complessiva del sistema.
Nel dimensionamento di strutture reticolari destinate all’assorbimento d’urto, l’indicatore più significativo è l’energia assorbita per unità di massa, o Specific Energy Absorption (SEA):
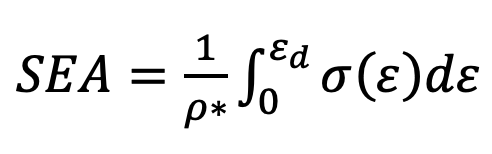
Essa si ottiene integrando la curva tensione-deformazione efficace σ(ε) fino alla deformazione di densificazione εd, che rappresenta il punto oltre il quale le celle collassano e la struttura perde la capacità di dissipare energia in modo progressivo. Il termine p* indica la densità del reticolo. L’inverso della densità moltiplica l’energia volumetrica assorbita, trasformandola in energia specifica per unità di massa. Tale parametro è determinante nelle applicazioni automotive e aerospaziali, dove l’efficienza energetica deve essere massimizzata a fronte di una massa contenuta.
Biomedicale, robotica e sistemi ad alte prestazioni
Nel campo biomedicale, le strutture reticolari hanno introdotto soluzioni innovative nella progettazione di protesi e impianti ortopedici. Reticoli metallici in titanio, realizzati mediante manifattura additiva, permettono di modulare il modulo elastico equivalente avvicinandolo a quello del tessuto osseo, riducendo il fenomeno dello stress shielding. Inoltre, la porosità controllata favorisce l’osteointegrazione, migliorando la stabilità a lungo termine dell’impianto.
In robotica e automazione industriale, l’alleggerimento dei bracci e delle strutture mobili mediante reticoli interni consente di ridurre le inerzie, migliorando la dinamica e la precisione del movimento. La possibilità di controllare le frequenze proprie del componente attraverso la variazione della topologia reticolare rappresenta un ulteriore vantaggio in sistemi soggetti a vibrazioni o accelerazioni elevate. In questo contesto, la progettazione dei metamateriali si integra con l’analisi modale e con la dinamica delle macchine, aprendo scenari applicativi ad alto valore aggiunto.
Anche nei sistemi di scambio termico e nelle applicazioni energetiche emergono potenzialità significative. Le strutture TPMS, caratterizzate da superfici continue e periodicità tridimensionale, offrono un’elevata area superficiale specifica e una buona resistenza meccanica, risultando idonee per scambiatori di calore compatti o strutture portanti multifunzionali.
Verso materiali a risposta programmabile
Le prospettive future dei metamateriali meccanici si orientano verso soluzioni a risposta adattiva o programmabile. Strutture auxetiche, caratterizzate da coefficiente di Poisson negativo, possono espandersi lateralmente sotto trazione, offrendo proprietà di assorbimento energetico e resistenza alla perforazione superiori rispetto ai materiali convenzionali. L’integrazione con materiali intelligenti o con sistemi attivi di controllo potrebbe condurre a componenti capaci di modificare localmente la rigidezza in funzione delle condizioni di carico.
Un ulteriore sviluppo riguarda la sostenibilità. La distribuzione ottimizzata della materia consente di ridurre il consumo di materiale primario, con benefici ambientali diretti. Inoltre, la possibilità di progettare strutture smontabili o riciclabili attraverso geometrie modulari rappresenta un potenziale contributo all’economia circolare.






