ENEA e Università di Roma Tor Vergata stanno mettendo a punto TORVEastro, un robot in grado di affiancare, e in alcuni casi sostituire, i membri degli equipaggi delle missioni spaziali orbitali.
Un nuovo robot in grado di affiancare, e in alcuni casi sostituire, i membri degli equipaggi delle missioni spaziali orbitali nelle attività di manutenzione e monitoraggio delle strutture esterne, per alleviarne lo stress e diminuire i rischi. È quanto stanno mettendo a punto ENEA e Università di Roma “Tor Vergata”, nell’ambito del progetto biennale TORVEastro, finanziato dalla Regione Lazio, tramite la società Lazio Innova.
Il progetto TORVEastro
Il progetto parte da un brevetto del prof. Marco Ceccarelli del Laboratorio di Robotica e meccatronica del Dipartimento di Ingegneria industriale dell’Università di Roma Tor Vergata, mentre per ENEA sono coinvolti i ricercatori del Laboratorio di Robotica e intelligenza artificiale del Dipartimento di Tecnologie energetiche e fonti rinnovabili.
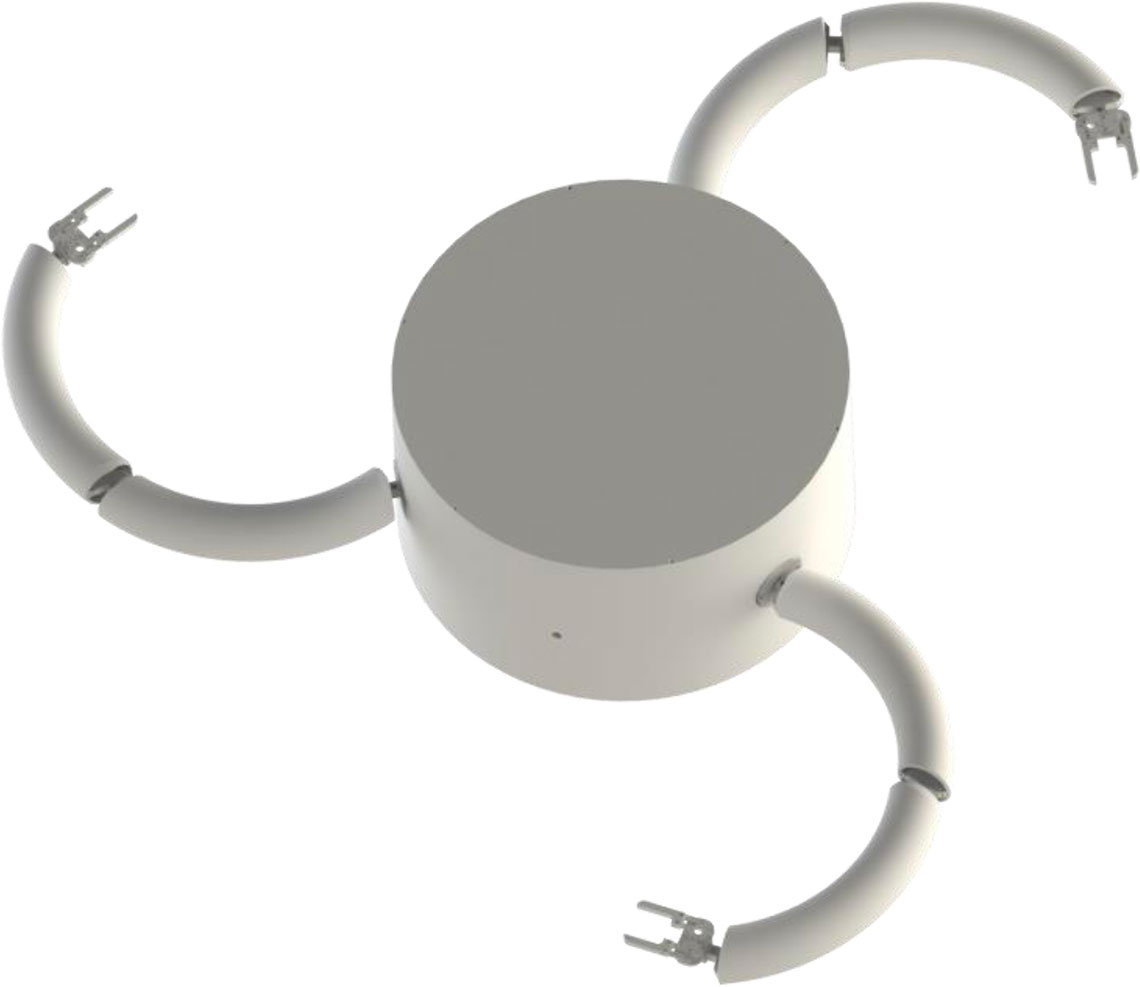
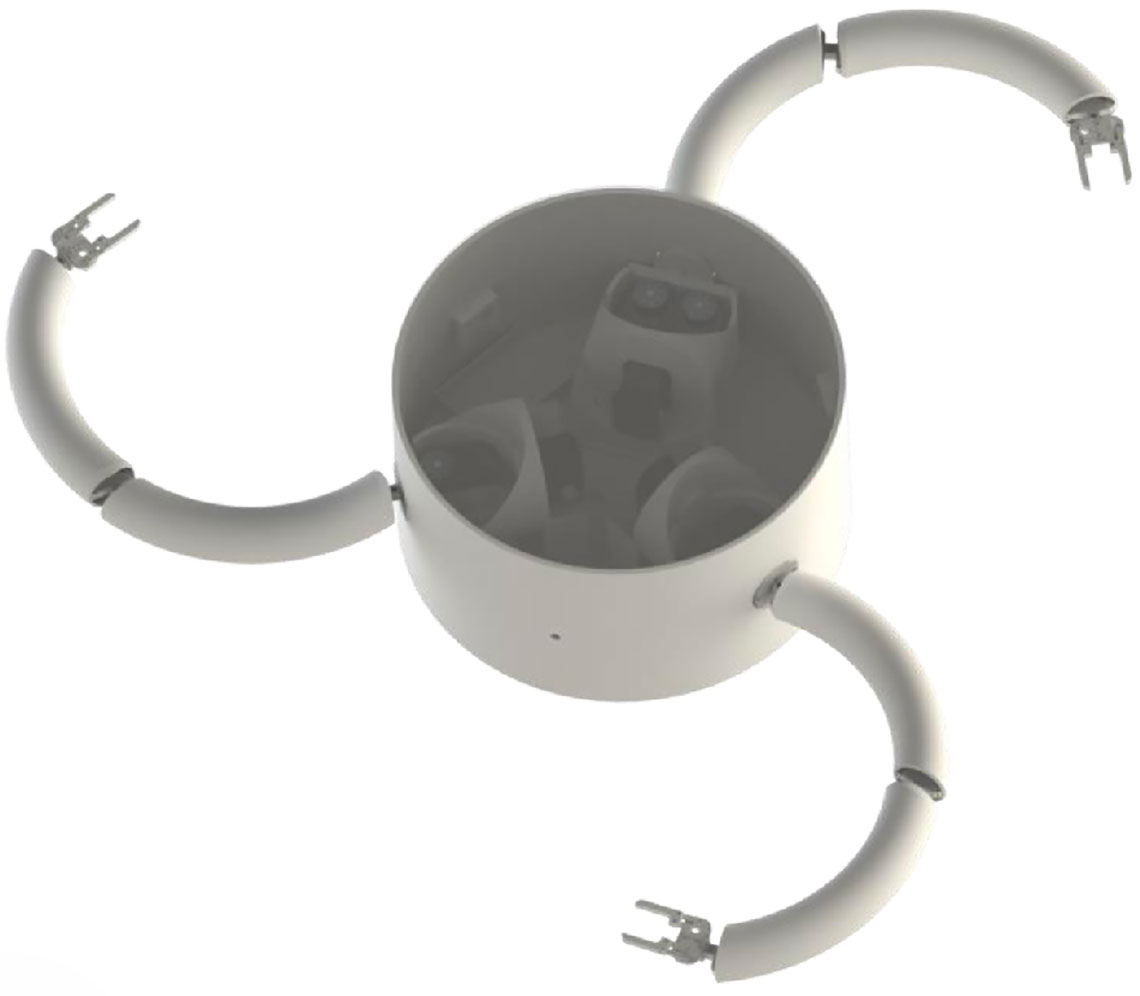
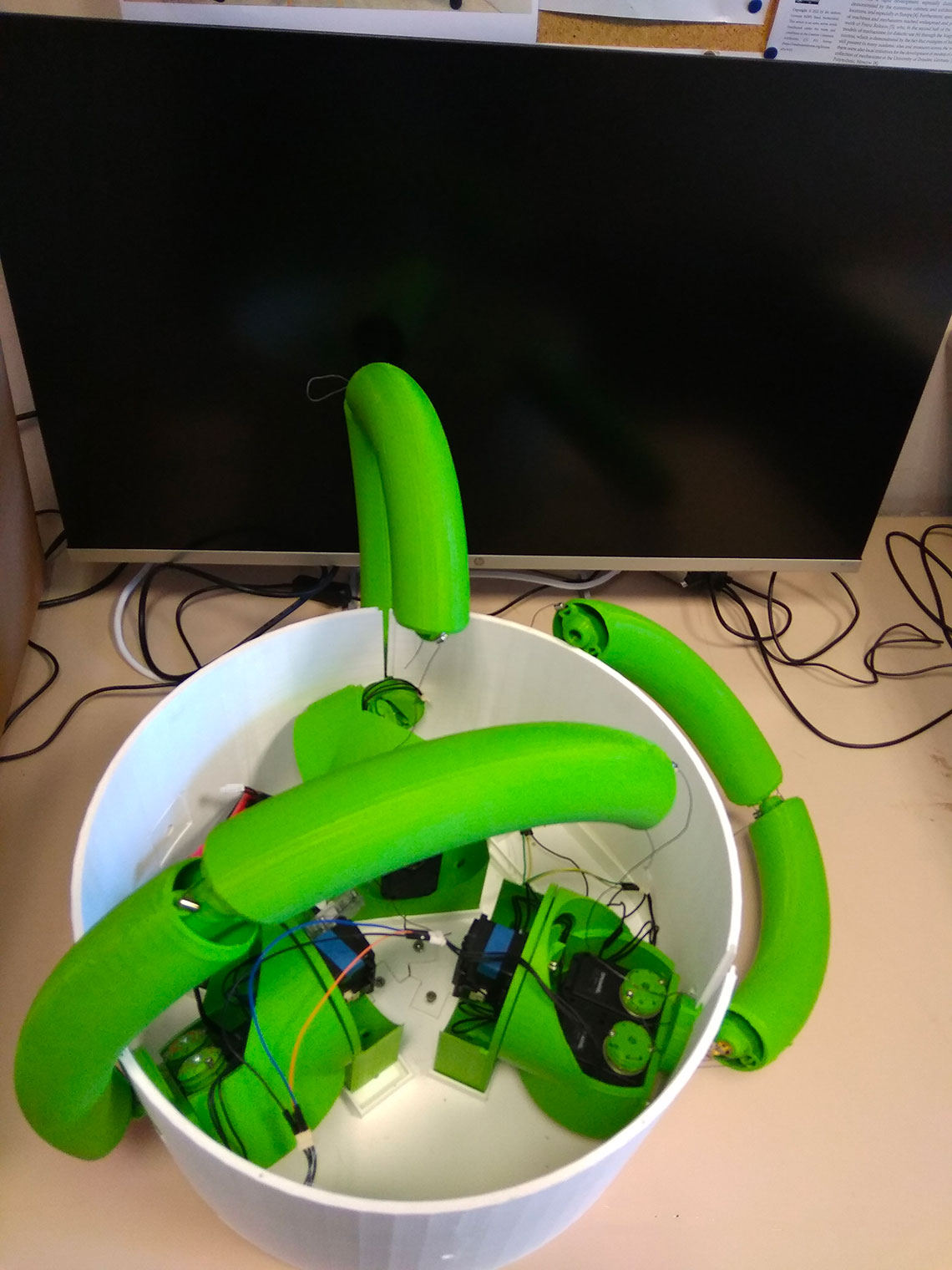
“Le innovazioni del robot TORVEastro risiedono nel suo corpo centrale, che contiene i servomotori a cui sono connessi degli arti che possano funzionare all’occorrenza come braccia o gambe, e nelle soluzioni adottate mediante cavi che agiscono come tendini per trasmettere l’azione dall’interno del corpo agli arti”, spiega il prof. Ceccarelli, responsabile scientifico del progetto.
“Nella progettazione meccanica del robot è stato necessario tener conto delle caratteristiche dell’ambiente spaziale, come le notevoli escursioni termiche, gli elevati livelli di radiazioni cosmiche, l’assenza di atmosfera e le collisioni con i detriti spaziali”, spiega il ricercatore Marco Paoloni, referente del progetto per ENEA.

Durante le attività svolte all’esterno della stazione orbitante, gli astronauti affrontano anche 6 ore di lavoro esposti a rischi che possono mettere a repentaglio la loro stessa vita, come ad esempio la presenza della cosiddetta ‘spazzatura spaziale’ costituita da detriti che, muovendosi ad alte velocità, possono perforare le tute spaziali. “L’impiego di un robot può essere risolutivo in questi casi, anche per evitare il rischio di malfunzionamento degli apparati di sopravvivenza presenti nelle tute indossate.”, aggiunge Paoloni.
Oltre a tenere conto dell’ambiente estremo, il progetto si sta focalizzando sulla precisione della lavorazione degli elementi meccanici e la robustezza del software di controllo. “Proprio per quest’ultimo, come ENEA, ci siamo occupati nello specifico di implementare gli algoritmi che permettano agli arti del robot di svolgere in modo coordinato i loro compiti”, conclude Paoloni.
Dopo essere stato presentato in diversi congressi internazionali, il robot TORVEastro sarà illustrato nei dettagli nel corso dell’evento finale del progetto ad aprile 2023.