

Robotica medicale e stampa 3D, azionamenti per soluzioni evolute: le imprese del segmento medicale innovano per crescere, con l’aiuto di macchinari sempre più evoluti e precisi e il contributo della stampa 3D. Robotica e Intelligenza Artificiale forniscono al settore medicale soluzioni per interventi chirurgici personalizzabili, creando nuove opportunità per le tecnologie additive.
Il settore dei dispositivi medici non ha conosciuto rallentamenti in questo ultimo periodo: i diversi segmenti, dal farmaceutico alla realizzazione di camici e mascherine, con aziende di dimensioni variabili dai grandi gruppi alle gestioni famigliari, sono accomunati dall’innovazione costante dei prodotti. Uno sforzo apprezzato dal mercato: l’export della produzione di macchinari medicali da 8 anni consecutivi è in costante crescita. Per continuare a tenere testa all’evoluzione dei mercati le aziende del settore medicale nei prossimi anni dovranno per forza di cose affrontare una grande prova: riposizionarsi ed evitare la trasformazione in commodity dei prodotti.

L’innovazione di prodotto comporta l’utilizzo di macchinari sempre più evoluti in grado di produrre in modo preciso e veloce. I fornitori fanno la loro parte per permettere a questa tendenza di svilupparsi: R+W, ad esempio, produce componenti particolarmente adatti a questo genere di macchinari, come i giunti ad elastomero di precisione della serie EK e i giunti ES2, sempre ad elastomero di precisione, con limitatore di coppia incorporato, un dispositivo di sicurezza in grado di fermare la macchina se si dovessero presentare problemi di sovraccarico, evitando così costosi fermi macchina.
La stampa 3D protagonista del settore
Nella ricerca costante di velocità e precisione, inoltre, la stampa 3D darà una grande mano alle imprese del settore, soprattutto in ambito di prototipazione, offrendo così la possibilità di sperimentare, migliorare il prototipo personalizzandolo e riducendo tempi e costi rispetto ai metodi di produzione tradizionali. Non a caso il mercato a livello mondiale è in grande crescita. Secondo gli esperti, infatti, in ambito medicale si stima che entro il 2023 il 25% dei dispositivi medici nei mercati sviluppati verrà stampato con tecnologie additive. La stampa 3D di metalli e polimeri è adatta, infatti, a vari impieghi nel settore medicale, che spaziano dalla produzione di protesi alla realizzazione di utensili e attrezzi ad hoc per molte tipologie di operazioni, alle placche di titanio costruite su misura per sostituire ossa danneggiate. Oggi ortopedia e odontoiatria sono i segmenti che più frequentemente fanno ricorso alla stampa 3D.
Robotica medicale, Intelligenza Artificiale e manifattura additiva
La creazione di sistemi di autoapprendimento porta a notevoli sviluppi anche nell’ambito della robotica collaborativa in ambito medicale. Un ruolo importante in tale evoluzione è dato anche dalle tecnologie additive, che contribuiscono a migliorare le caratteristiche meccaniche e funzionali dei sistemi robotici, estendendo le funzionalità di supporto ed estensione delle abilità del chirurgo. L’obiettivo principale sarà quindi quello della realizzazione rapida di sistemi personalizzati, sulla base delle particolarità sia dell’intervento chirurgico da eseguire che delle condizioni del paziente. È notizia recente la collaborazione tra Intel e l’Università della California, Berkeley, che ha prodotto la realizzazione di un sistema di AI semi-supervisionato per la sutura chirurgica automatizzata. L’apprendimento visivo costituisce una svolta notevole per la robotica collaborativa in ambito medicale, specialmente per la grande quantità di materiale formativo a disposizione. In questo contesto, il ruolo delle tecnologie additive sta acquisendo un’importanza sempre più crescente, specie nelle fasi di preparazione degli interventi chirurgici. La tendenza più recente (e sempre più diffusa) è quella di affidarsi a modelli stampati in 3d, che riproducono organi ed altri particolari anatomici, da impiegare nelle attività di addestramento dei chirurghi e di configurazione dei sistemi di robotica medicale impiegati. Un importante esempio di questa metodologia di preparazione degli interventi chirurgici è stata condotta nel 2016 durante l’intervento di separazione di due gemelli siamesi, condotta dal Dr. James T. Goodrich, chirurgo di fama mondiale (purtroppo scomparso di recente), pioniere dell’impiego dei modelli anatomici stampati in 3D per la preparazione di interventi di elevata complessità. Quest’intervento, durato ben 27 ore e che ha coinvolto un’equipe di 40 tra medici ed ingegneri esperti in tecnologie additive, ha elaborato una tecnica innovativa di preparazione delle operazioni chirurgiche, basata sull’impiego combinato di immagini tridimensionali (ricavate dai dati delle analisi strumentali come la Tomografia Computerizzata,TC o la Risonanza Magnetica Nucleare, RMN) e di stampa 3D, con la quale sono state realizzate sia le necessarie protesi, che un modello 3D anatomico in resine trasparenti delle parti anatomiche sottoposte all’intervento in questione. Sulla base di queste esperienze, risulta di fondamentale importanza l’impiego dei modelli di parti anatomiche stampati in 3d, sia per le simulazioni nell’ambito della chirurgia robotica (in termini di addestramento, ottimizzazione e preparazione degli interventi), che come riferimento per le attività di progettazione e realizzazione delle catene cinematiche dei sistemi di movimentazione di robot medicali con caratteristiche di autonomia più o meno marcate. In Figura 1 (la foto di apertura) è mostrato un modello per le simulazioni chirurgiche realizzato con tecnologie additive, impiegato nelle attività di addestramento dei chirurghi alle tecniche di laparoscopia.

In Figura 2 è mostrato un esempio di impiego di un analogo modello per le operazioni di verifica dei parametri operativi di un robot medicale, anch’esso impiegato in laparoscopia. L’integrazione sempre più diffusa degli algoritmi di AI nei sistemi di robotica medicale sta creando opportunità significative per le tecnologie additive, al di là delle soluzioni per la preparazione degli interventi chirurgici, come quelle mostrate in precedenza. La crescente richiesta di sistemi robotici collaborativi (usati anche in ortopedia, oltre che negli interventi in laparoscopia) sta accrescendo la necessità di disporre di una produzione di componentistica rapida ed efficiente. Tale necessità viene soddisfatta dal principale vantaggio derivante dall’impiego delle tecnologie additive: la semplificazione e la riduzione di tempi e costi delle fasi di ricerca e sviluppo, in termini di realizzazione di prototipi, di svolgimento di test e di produzione di miniserie di componenti robotici e strumentazioni chirurgiche. L’impiego delle tecnologie additive consente, inoltre, il conseguimento di elevati livelli di personalizzazione della componentistica, con promettenti risvolti nelle attività di progettazione e realizzazione degli opportuni accoppiamenti cinematici. Un’interessante e promettente soluzione a questa criticità è stata proposta, di recente, dall’Australian Centre for Robotic Vision, un centro di ricerca per la visione robotica fondato nel 2014 dal Consiglio delle Ricerche Australiano (Australian Researc Council, ARC). In tale soluzione, il punto di partenza è dato dai risultati di imaging diagnostico tramite Risonanza Magnetica, con cui mappare le caratteristiche dell’articolazione del ginocchio di un paziente, da sottoporre ad intervento con tecniche di artroscopia. Partendo da questi dati, la soluzione proposta procede alla progettazione della soluzione di robotica modulare personalizzata più adeguata alle particolari conformazioni anatomiche del ginocchio del paziente. Le attività dei chirurghi saranno così condotte ricorrendo all’utilizzo di un sistema robotico modulare, i cui componenti verranno realizzati ad hoc con le opportune tecnologie di stampa 3D.
Primo setup sperimentale

Un primo setup sperimentale di questo sistema è stato elaborato dal giovane ricercatore Andrew Razjiigaev dell’Australian Centre for Robotic Vision, che ha concepito il primo robot di tipo snakebot per l’artroscopia del ginocchio. Con il termine snakebot si individua una tipologia di robot biomorfo, simile ad un serpente, che ha la caratteristica di essere iper-ridondante, ovvero di richiedere ben più di sei gradi di libertà per la realizzazione (e la descrizione del moto) della sua catena cinematica. Uno dei primi esempi di snakebot destinato ad impieghi medicali è stato concepito dal CMU Robotics Lab della Carnegie Mellon University. In Figura 3 è mostrato una versione di questo robot. Il modello del CMU Robotics Lab per uso medicale è stato derivato da quello mostrato in Figura e realizzato in dimensioni talmente sottili da poter manovrare intorno agli organi all’interno di una cavità toracica umana. Gli snakebot, a prescindere dalle dimensioni delle singole realizzazioni, sono caratterizzati da un basso rapporto tra la superficie della sezione trasversale e la lunghezza, per cui riescono a manovrare all’interno di spazi molto stretti. Il setup sperimentale, realizzato dal ricercatore Andrew Razjiigaev, viene mostrato nelle immagini seguenti.
(fonte: https://www.roboticvision.org/
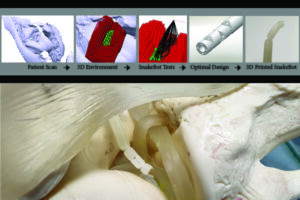
È estremamente interessante esaminare i singoli step di applicazione di questa soluzione:
- si parte dai dati delle analisi di imaging del ginocchio del paziente. Con la supervisione di un medico chirurgo, il computer classifica le regioni che devono essere raggiunte dagli snakebot (superfici verdi) e le regioni da evitare (superfici rosse), come mostrato in Figura 4;
- la geometria risultante fornisce un ambiente 3D dove gli snakebot competono in un’evoluzione simulata. Ciò dà la possibilità, ad un numero di proposte di progettazione standard degli snakebot partecipanti, di essere testate e valutate sulla bontà delle loro prestazioni, cioè su quanto riescano a raggiungere, con efficacia, determinate posizioni all’interno del ginocchio di un paziente. Le linee nere mostrate in Figura 4 rappresentano alcune delle traiettorie seguite dagli snakebot in competizione per raggiungere le posizioni prefissate sull’articolazione del paziente;
- a questo punto entra in gioco un algoritmo di computational design evolutivo, generando in continuazione nuove configurazioni di snakebot, ritestandole ed eliminando le varianti più “deboli” finché ne sopravvive solo una, che si abbina in maniera unica all’anatomia del paziente. Lo snakebot che riesce a raggiungere le posizioni prefissate in sicurezza e con più destrezza vince la competizione evolutiva, aggiudicandosi il riconoscimento di design ottimale;
- gli snakebot ottimali vengono così generati come modelli 3D e realizzati tramite tecnologie additive, al fine di diventare degli strumenti chirurgici low-cost, monouso ed unici per ciascun paziente;
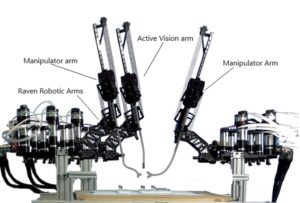
- gli snakebot sono così pronti per essere impiegati nell’intervento chirurgico. Questi micro robot vengono collegati ad una piattaforma robotica più grande, come la piattaforma robotica collaborativa per la ricerca Raven II (concepita alle università di Washington e di Santa Cruz), che li posiziona in modo consentire il loro ingresso nei punti in cui sono state realizzate le incisioni chirurgiche. Il risultato di questo step è mostrato in Figura 5.
- uno dei primi possibili sviluppi di questa soluzione è l’impiego di due snakebot con gli strumenti chirurgici istallati alle estremità, in modo da consentire al chirurgo di eseguire interventi chirurgici a distanza con due bracci robotici;
- nel sistema a robot multipli mostrato in Figura 5, vi può essere un terzo snakebot che monta una telecamera alla sua estremità. Questo sistema di acquisizione delle immagini verrà usato da un sistema di visione robotica (robot vision) per mappare le cavità del corpo del paziente, cosicchè il robot può essere guidato verso le aree di interesse e tenuto lontano dalle aree delicate da evitare. Fornirà quindi funzioni di tracciamento sia per i due snakebot che per l’area di lavoro dell’intervento, operando come gli occhi del chirurgo.
(fonte: https://www.roboticvision.org/)
Gli ambiti di ricerca fin qui esposti forniscono miglioramenti evidenti non solo in termini di non invasività e precisione degli interventi chirurgici, ma costituiscono anche un interessante ambito di ricerca e sviluppo per tutta la componentistica necessaria alla realizzazione degli accoppiamenti cinematici, viste le elevate capacità di personalizzazione delle soluzioni (anche preesistenti) e di realizzazione rapida ed efficiente dei prototipi, che solo l’impiego delle tecnologie additive può fornire.
Il ruolo del fornitore di componenti

Un’attività complessa come la progettazione nell’ambito della robotica medicale, che integra componentistica evoluta realizzata tramite le tecnologie additive, può trovare un valido supporto nei fornitori di componenti. È il caso di R+W, azienda leader nella produzione di giunti e alberi di trasmissione, in grado di mettere la sua esperienza a disposizione del progettista. Nel settore della robotica medicale, R+W fornisce una gamma completa di soluzioni per tutte le esigenze di trasmissione e limitazione della coppia: oltre ai già citati giunti ad elastomero della serie EK, l’azienda offre i giunti a soffietto in miniatura della serie MK ed FK, giunti a soffietto metallico della serie BK, e limitatori di coppia serie SK. I giunti a soffietto metallico in miniatura MK eappresentano una combinazione vincente di prestazioni eccellenti e ingombro ridotto.
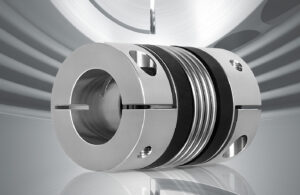
La gamma di giunti MK è decisamente ampia (decine di modelli suddivisi in dieci serie) e consente di trovare il giunto ideale per ogni applicazione, ferma restando la capacità e disponibilità dei tecnici di R+W di trovare soluzioni ad hoc per particolari esigenze. La serie MK4, una delle più popolari, comprende diversi modelli, tutti di dimensioni contenute (diametro esterno dai 15 ai 40 mm) per valori di coppia nominale da 0,5 a 10 Nm. Realizzati in materiali di alta qualità – acciaio inox ad alta flessibilità e alluminio – sono resistenti alla corrosione, adatti per velocità di rotazione fino a 20.000 giri al minuto (e oltre, con apposita bilanciatura), assolutamente privi di gioco, torsionalmente rigidi, compensano ogni tipo di disallineamento (assiale, angolare e laterale) e presentano un ridotto momento d’inerzia.

Fra i giunti miniaturizzati rientra anche l’inovativo FK1 Microflex, con grani di fissaggio radiali. Le caratteristiche più apprezzate dei giunti miniaturizzati comprendono la grande facilità di montaggio e smontaggio e la totale assenza di necessità di manutenzione. I giunti BK a soffietto metallico, precisi e senza gioco, sono molto apprezzati per il basso momento di inerzia, la totale assenza di necessità di manutenzione, la durata praticamente infinita e soprattutto la totale affidabilità. Assolutamente privi di gioco, i limitatori di coppia SK permettono di proteggere il sistema motore in caso di sovraccarico, scollegandolo dalla parte condotta nel giro di pochi millisecondi. Estremamente precisi, trasmettono la coppia con gande accuratezza e intervengono solo in caso di effettiva necessità. Inoltre consentono un riarmo semplice e rapido non appena viene rimossa la causa del sovraccarico.






