In questi ultimi anni si sono moltiplicati gli studi per la realizzazione di un veicolo elettrico piccolo, leggero, pieghevole e trasportabile (PAMD) che possa risolvere il problema del “primo ed ultimo miglio” nei centri delle metropoli congestionate dal traffico. Una gara a livello mondiale, lanciata nel settembre 2011 che terminerà nel 2013, mette a confronto i progetti degli studenti di 35 università. L’articolo presenta alcuni modelli di monoruota e due ruote elettrici in commercio e le impostazioni progettuali del team italiano, formato dagli studenti del Politecnico di Torino.
Ing. Libero Quitadamo, Ing. Alessandra Tamburro – Dipartimento Ingegneria Gestionale e della Produzione-Politecnico di Torino
Centri urbani sempre più congestionati
La nuova mobilità urbana: elettrica, intelligente e condivisa
Si stima che nei prossimi vent’anni le aree urbane diventeranno la dimora per più del 60% degli abitanti della Terra, con un conseguente incremento del numero di automobili circolanti (più di 1.2 bilioni) e dei relativi problemi.
Per affrontare questi problemi di congestione stradale ed inquinamento, e parallelamente ai mezzi di trasporto pubblico ecosostenibili, si stanno sviluppando in tutto il mondo studi di PAMD (Portable Assisted Mobility Device), mezzi elettrici di utilizzo personale come monopattini, monocicli e due ruote per completare “il primo e l’ultimo miglio di tragitto” (“First Mile / Last Mile Transit”), ad integrazione e complemento del trasporto pubblico.
Esso è stato presentato come una valida alternativa e sviluppo dei sistemi di trasporto personale già offerti oggi ed in rapida diffusione nelle grandi metropoli (stazioni di bici comunali, auto elettriche ecc.).
Esempi di PAMD sul mercato
Sono già numerosi oggi gli esempi di PAMD in commercio; essi presentano configurazioni molto diverse ma le presunte novità di questi dispositivi non devono far dimenticare che nell’impostazione e nell’architettura possiamo fare riferimento sostanzialmente ai tipi fondamentali di veicoli che tradizionalmente hanno spostato un uomo seduto; in piedi; reclinato in avanti.
Tabella 1 – Caratteristiche tecniche Mo-Vete
| Mo-Vete | Velocità massima | 20 km/h |
| Peso | 13 kg | |
| Potenza | 400 W | |
| Tempo di ricarica batterie | 120 min | |
| Autonomia batterie | 20 km |
Tabella 2 – Classificazione PAMD
| Dispositivi pieghevoli | Bicicletta con pedalata assistita, YikeBike |
| City platforms | Segway, Mo-Vete, Robin M1 Qugo, Toyota winglet |
| Miscellanea | Honda U3-X, Solowheel, Electric skates, SpnKix, Toyota-I Real |
Il capostipite della prima categoria è il mezzo elettrico a due ruote pieghevole con pedalata assistita che conosce anche in Italia crescente diffusione (si pensi che negli ultimi due anni sono state vendute più biciclette che auto): La bicicletta elettrica assume caratteristiche sempre più tecnologiche ed innovative: un esempio di evouzione è rappresentato YikeBike (Figura 1, Tabella 3).

Tabella 3 – Caratteristiche tecniche Yike Bike a due ruote
| Costo | 1.720€ (alluminio) 3.271€ (fi bre di carbonio) |
| Velocità | 23 km/h |
| Potenza | 450 W |
| Motore | Motore brushless DC |
| Freni | Elettrici rigenerativi antiskid |
| Batterie | Agli ioni di litio |
| Tempo di ricarica | 50 min con caricatore veloce opzionale 120 min con caricatore standard |
| Autonomia | 10 km 20 km con batterie addizionali 30 km con due batterie addizionali |
| Dimensione ripiegata | 43 dm3 |

Tabella 4 – Caratteristiche tecniche biciclo Qugo
| Peso (senza batteria) | 25 kg |
| Velocità | 25 km/h |
| Dimensioni | 1150x580x1350 mm |
| Dimensione ripiegata | 1150x580x780 mm |
| Potenza | 1 kW |
| Freni | Tre dischi |
| Batterie | Li-ion 36 V o 48 V, 9-12 Ah |
| Tempo di ricarica | 3-4 h |
| Autonomia | 25 km per carica |
La seconda categoria è rappresentata da tutti quei veicoli che vengono guidati stando in piedi: esempio tradizionale è il monopattino che trova un suo sviluppo nel Qugo.
La svolta in questo settore, tuttavia, si è avuta nel 2002 con la comparsa del Segway (Figura 3,Tabella 5) che, con il suo sistema di auto bilanciamento basato sulla teoria del pendolo inverso [1], ha reso possibile la mobilità elettrica su due ruote riducendo al massimo possibile le dimensioni della piattaforma.

Tabella 5 – Caratteristiche tecniche Segway a due ruote
| Velocità massima | 20 km/h |
| Peso | 54,4 kg |
| Capacità di carico | 118 kg |
| Dimensioni | 53 x 77 cm |
| Pendenze superabili | 20° (36%) |
| Autonomia | Fino a 19 km fuoristrada |
| Motori | Due brushless, servomotori DC |
| Ruote | 35 cm lega metallica |
| Pneumatici | 17,7 cm a bassa pressione |
| Tipo Batterie | 2 pacchi di batterie Saphion lithium-ion 96 celle 73.6 V 5.3 Ah |
| Carica-batterie interno | 100/240 V, 50/60 Hz |
| Tempo di ricarica | 8h |
| Cicli di ricarica | 1.000 garantiti da Segway Inc. |
La contro rotazione delle ruote ha poi esaltato al massimo la manovrabilità.
Da allora si sono moltiplicati veicoli elettrici a due ruote con caratteristiche simili a quelle del Segway ma meno costosi e con dimensioni ridotte come ad esempio la gamma di Toyota Winglet ed il Robin M1 (Figura 4, Tabella 6).

Tabella 6 – Caratteristiche tecniche Robin M1 a due ruote
| Costo | 3000 € |
| Velocità massima | 20 km/h |
| Peso | 18,5 kg |
| Capacità di carico | 150 kg |
| Dimensioni | 460 x 320 x 900 mm |
| Potenza | 1,3 kW |
| Pendenze superabili | 15° |
| Batterie | Agli ioni di litio |
| Autonomia | 20-30 km |
| Tempo di ricarica | 1-3 h |
Ma la fantasia dei progettisti e dei designer si è spinta oltre e sul mercato sono comparsi dispositivi originali quali ad esempio con il monoruota Honda U3-X (Figura 5, Tabella 7) caratteristico per la sua ruota omnidirezionale, costituita da una corona più grande, che permette il moto longitudinale, e da tante piccole sfere, che, invece, permettono il moto laterale;

Tabella 7 – Caratteristiche tecniche monociclo Honda U3 – X
| Costo | 500 € |
| Dimensioni | 3,15×1,60×6,50 cm |
| Peso | < 10 kg |
| Batterie | Agli ioni di litio |
| Autonomia batterie | < 1h |
| Destinazione | Ambienti interni |
SoloWheel (Figura 6, Tabella 8) è il monoruota che rappresenta la soluzione estrema in cui l’utente deve rimanere in equilibrio stando in piedi sia durante la marcia rettilinea che durante la fase di sterzatura.

Tabella 8 – Caratteristiche tecniche monociclo Solowheel
| Costo | 1400€ |
| Velocità massima | 16 km/h |
| Dimensioni | 40×6 cm |
| Potenza | 1 kW |
| Batterie | Agli ioni di litio |
| Autonomia batterie | 30 km |
| Sistema di controllo | Sensori giroscopici |
| Massimo angolo inclinazione | 30° |
| Destinazione | Ambienti esterni |
La gara di progettazione tra 35 università di tutto il mondo
Le specifiche del PAMD
In tutto questo fiorire di attività progettuali innovative riguardanti i mezzi elettrici per il trasporto personale, il consorzio di università PACE ha lanciato il PAMD Project, della durata di due anni, nel quale sette team, costituiti ciascuno da studenti di cinque diverse università, dovranno collaborare insieme per realizzare un PAMD. L’Italia è rappresentata dal Politecnico di Torino, team leader della squadra 7, composta da Tongji University – Design, Tongji University – Engineering, Technion – Israel Institute of Technology.
Nella sezione ADM de “Il progettista industriale” (Gennaio 2013) erano stati annunciati l’inizio del progetto e la formazione del team del Politecnico di Torino (Figura 7).
Le specifiche di progetto
peso massimo 20 kg;
- dimensioni contenute e/o compattabili;
- batteria con un’autonomia di almeno 3 km che possa essere ricaricata presso una tradizionale rete elettrica domestica;
- velocità massima di 20÷25 km/h;
- prevedere un utilizzo o in luoghi chiusi con velocità inferiore a 6 km/h.

Attività di progetto dei prossimi due anni
Il programma della gara prevede essenzialmente due fasi annuali:
- impostazione del progetto (ricerca di mercato, modellazione e simulazione 3D – prototipo virtuale);
- analisi di fattibilità (ricerca fornitori, analisi del manufacturing e dei costi – prototipo reale e prove).
Si tratta di un programma completo che ricalca tutte le fasi (comprese pianificazione, design, ingegnerizzazione ed industrializzazione) di un vero progetto industriale svolto attraverso la collaborazione di team di diversi Paesi.
La legislazione
Fondamentale per le specifiche di progetto è lo studio delle leggi in vigore sulla circolazione dei PAMD, molto diversificate a seconda della tipologia di veicolo e del Paese.
Ad esempio, per i veicoli elettrici a due ruote come le bicicletta la legislazione [4,5] distingue due tipologie differenti di veicolo: E-PB e E-PAB (nelle prime il motore funziona anche senza nessun movimento dei pedali, mentre nelle seconde c’è bisogno della rotazione dei pedali) e da limitazioni in termini di potenza del motore e di velocità massima raggiungibile.
La Tabella 9 da un’idea della diversificazione delle leggi vigenti in vari Paesi.
Non tutti i Paesi hanno sviluppato una legislazione “ad hoc” per questi veicoli e perciò fanno riferimento alla normativa per le biciclette elettriche.
Altro esempio è quello dei monopattini elettrici la cui circolazione è libera in aree private non soggette alla regolamentazione del Codice della Strada [6].
Tabella 9 – Legislazione bici elettriche
| Nazione | Potenza Max. | E-PB consentita? |
E-PAB consentita? |
Velocità Max. |
| USA | 750 W | Si | Si | 32 kph |
| Canada | 500 W | Si | Si | 32 kph |
| EU | 250 W | No | Si | 25 kph |
| Japan | 250 W | No | Si | 24 kph |
| China | Si | Si | 20 kph | |
| Australia | 200 W | Si | Si | Non specificato |
Lo sviluppo e ricerca di batterie sempre più leggere e performanti
Poiché il dispositivo deve essere elettrico, la batteria va selezionata in base alla potenza assegnata al PAMD.
Le batterie per autotrazione sono tra i componenti su cui si sono concentrati grandi
investimenti industriali.
L’evoluzione è rappresentata in Figura 8 e nella Tabella 10, ma nel numero di Novembre 2012 de “Il Progettista Industriale” nella rubrica “Innovazioni dal mondo”, già si annunciavano nuove batterie al Litio su cui ha investito la GM e che raggiungeranno una densità energetica di 400 Wh/kg che potrebbe dimezzare i costi delle batterie attuali.
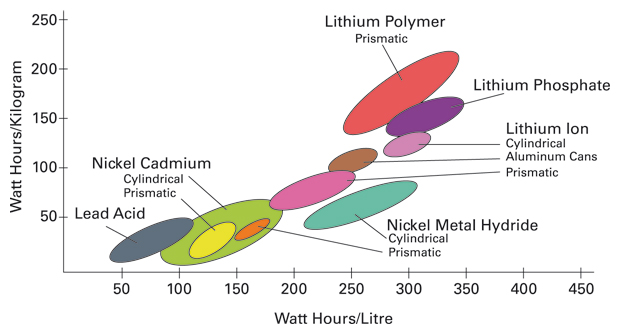
Tabella 10 – Caratteristiche batterie
| Tipo | Tensione di una cella (V) |
Densità energia (Wh/kg) |
Cicli di carica |
Tempi di carica (h) |
| Piombo | 2,4 | 30-50 | 200-300 | 8-16 |
| Ni-Cd | 1,25 | 48-80 | 1500 | 1 |
| Ni-MH | 1,25 | 60-120 | 300-500 | 2-4 |
| Ni-MH LSD | 1,25 | 60-120 | 1800 | 2-4 |
| Alcalina | 1,5-1,65 | 80-160 | 100 | 1-16 (secondo la capacità) |
| Li-ion | 3,7 | 110-160 | 500-1000 | 2-4 |
| Li-Po | 3,7 | 130-200 | 300-500 | 2-4 |
Analisi di mercato
In questo momento il team degli studenti del Politecnico di Torino sta coordinando la ricerca di mercato che si sta svolgendo in parallelo in Cina, Israele ed in Italia e che deve orientare le scelte di impostazione su cui i lettori de “Il Progettista Industriale” saranno informati per primi.
Bibliografia
LIN, TSAI, HUANG, Adaptive Robust Self-Balancing and Steering of a Two-Wheeled Human Transportation Vehicle, J. Intell Robot Syst. (2011) 62:103–123 SEGWAY Normativa vigente, 06/12/2012 A.R. JHA, Next-Generation Batteries and Fuel Cells for Commercial, Military, and Space Applications, Giugno 05, 2012, CRC Press GEOFFREY ROSE, E-bikes and urban transportation: emerging issues and unresolved questions, Transportation (2012) 39:81–96.
Direttiva 2002/24/CE del Parlamento europeo e del consiglio, Gazzetta ufficiale delle Comunità europee, 18 marzo 2002.
Codice della strada, art. 190 comma 8-comma 9, 10 luglio 2003.