

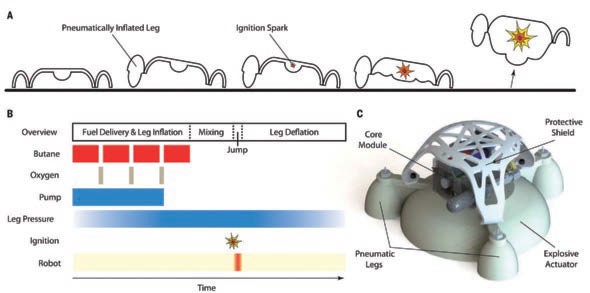
Un gruppo di ricercatori dell’università di Harvard ha realizzato un “soft robot” che integra materiali elastici e rigidi in un guscio realizzato in una singola stampa 3D: vengono utilizzati nove differenti strati di materiali, partendo da un materiale molto soffi ce e simile alla gomma e arrivando fino a un guscio protettivo rigido, simile a una termoplastica. Due sono i componenti principali del robot: un corpo morbido con tre gambe pneumatiche, e un cuore rigido che contiene i componenti principali, tra cui una batteria e un compressore. Il robot si muove grazie a una combustione interna di butano e ossigeno, mentre il corpo morbido ha la funzione di assorbire gli impatti: gli strati di rigidezza differente servono appunto a ridurre gli sforzi nella zona in cui i componenti elettronici si collegano al corpo. La particolare tecnica di locomozione del robot permette di evitare completamente la presenza di parti che scorrono o ruotano: i giunti tradizionali sono completamente assenti, migliorandone l’affidabilità e rendendolo ideale per l’utilizzo in ambienti ostili. Il robot gonfi a alcune delle sue gambe pneumatiche in modo da puntarlo nella direzione desiderata; l’ossigeno e il butano vengono quindi miscelati e incendiati, lanciando il robot in aria. La costruzione del robot permette di sopravvivere ciascun atterraggio senza nessun danno alla struttura e all’elettronica. La produzione tramite stampa 3D multimateriale rappresenta un passo importante nella fabbricazione dei “soft robots”, finora poco sviluppati a causa della necessità di assemblaggi complessi.



